Apollo与Carsim/TruckSim联合模拟
一分耕耘,一分收获!既然都打开这篇《Apollo与Carsim/TruckSim联合模拟》,就坚持看下去,学下去吧!本文主要会给大家讲到等等知识点,如果大家对本文有好的建议或者看到有不足之处,非常欢迎大家积极提出!在后续文章我会继续更新科技周边相关的内容,希望对大家都有所帮助!
1.背景
仿真在自动驾驶研发中扮演着重要角色,它能够极大地提高研发效率,并为算法的可靠性提供保障。百度Apollo系统作为一款优秀的开源平台,非常适合有意学习自动驾驶的朋友进行研究。此外,Carsim/Trucksim是备受推崇的经典汽车动力学仿真工具。
本文介绍了通过Apollo和Trucksim的联合,实现本地实时仿真的方法。适合初学者搭建仿真平台并研究Apollo系统。
2. 架构设计
Apollo工程的核心代码是用C++实现的。Trucksim的常用接口包括simulink、Python和C语言。本文将首先介绍Apollo、simulink和Trucksim联合仿真的架构,并讨论该仿真系统存在的问题。接下来,将重点讨论Apollo和Trucksim的联合仿真。
2.1 Apollo, simulink和Trucksim方案
Simulink和Apollo可以通过ROS进行通信。由于Apollo的消息数据格式是protobuf,而Simulink的ROS工具只支持标准的ROS消息(ROS msg),因此可以在Apollo中添加一个格式转换的节点来实现兼容。关于Simulink调用Trucksim的方案,网络上有很多资源可供参考,就不再详述了。
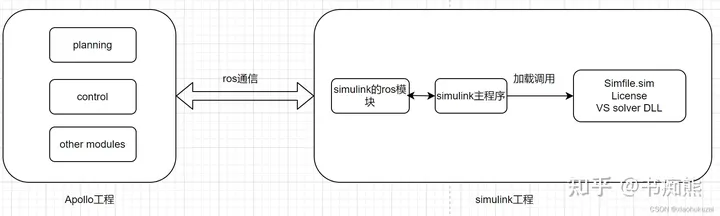
simulink方案图
2.2 Apollo,rosbridge和Trucksim方案
建立QT工程和Apollo工程之间的websocket通信。在Apollo工程中,通过增加rosbridge(或者cyber_bridge)模块实现ros消息(或者cyber消息)与websocket的互转。QT工程作为websocket客户端使用C++实现,并调用Trucksim的动态库,实现实时运行Trucksim的功能。
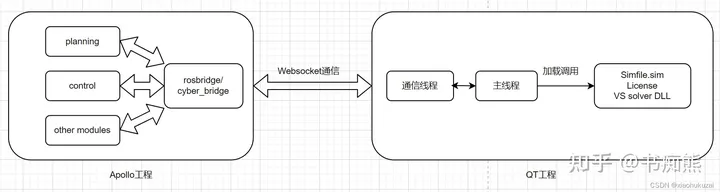
rosbridge方案图
3. 功能实现
3.1 Apollo, simulink和Trucksim方案
3.1.1 Simulink配置
Simulink的工具包中有ROS的支持包,配置ROS网络地址如图2所示。Hostname/IP Address和Port分别为ROS_MASTER_URI的地址和端口号,在上面的通信机制中有说明。
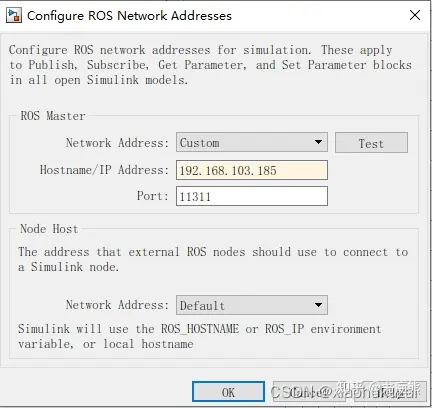
配置ROS网络地址
ROS subscriber接收interface的消息,因此Topic, Message type, Sample time要与interface中程序相对应。
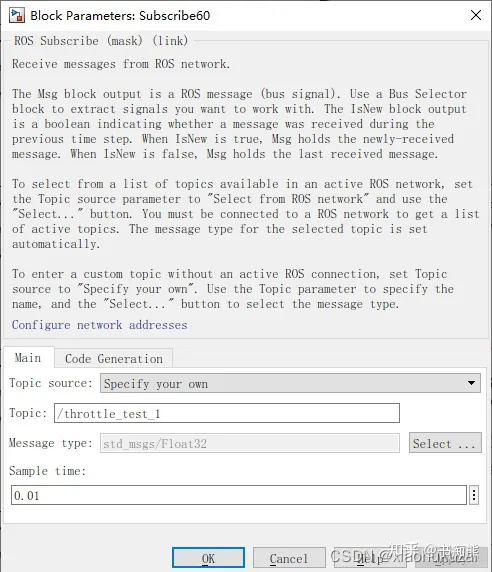
配置ros subcribe
为了便于调试验证,现在MATLAB端启动ROS。配置过程如下:
MATLAB设置的指令:
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 TruckSim配置
配置界面
Trucksim是向导式编程,参数配置界面:卡车选择5A Tractor(SS_SSS),具体参数见图3.控制界面:Models选择simulink。
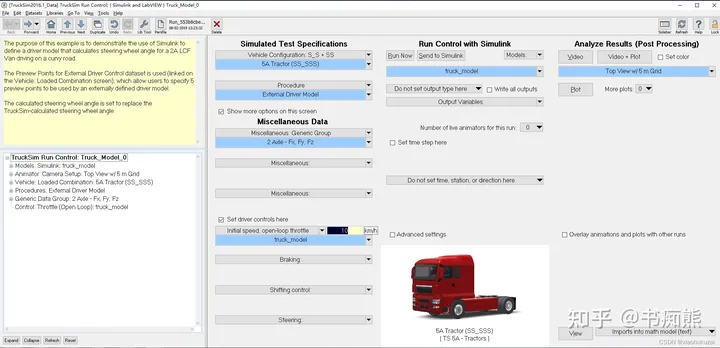
主界面
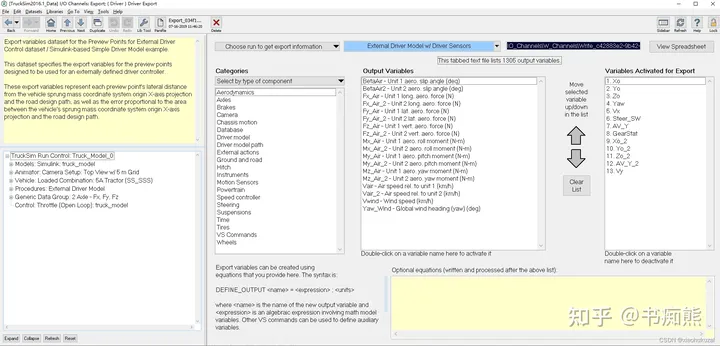
输入参数配置界面
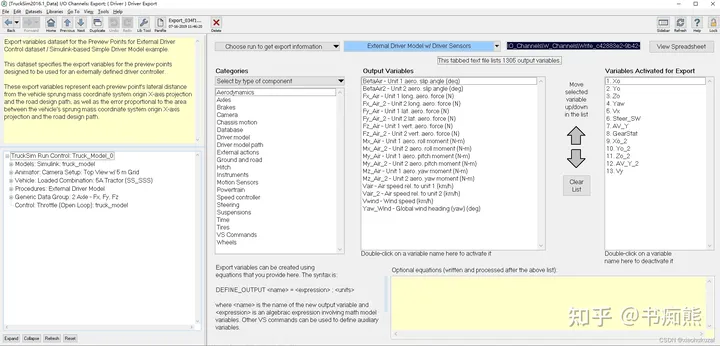
输出参数配置界面
3.2 Apollo, rosbridge和Trucksim方案
3.2.1 apollo中配置rosbridge
rosbridge安装网上教程较多,本文不再赘述。
使用方法如下:
cd ros_pkgs_ws
catkin_make
启动rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATH
roslaunch rosbridge_server rosbridge_websocket.launch
3.2.1 Qt工程配置说明
3.2.1.1 Qt和CMake版本信息

3.2.1.3 Apollo工程和QT工程的接口定义
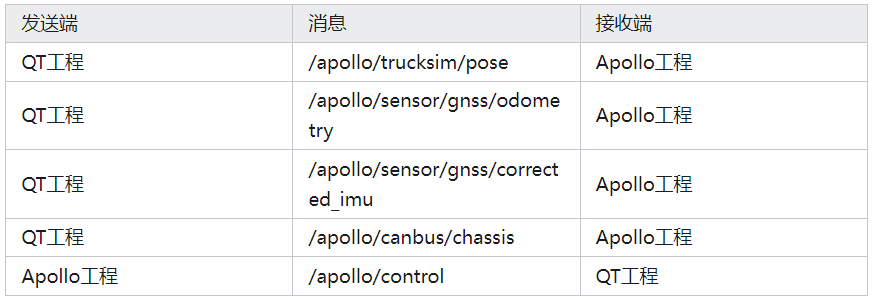
/apollo/trucksim/pose
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
到这里,我们也就讲完了《Apollo与Carsim/TruckSim联合模拟》的内容了。个人认为,基础知识的学习和巩固,是为了更好的将其运用到项目中,欢迎关注golang学习网公众号,带你了解更多关于工具,自动驾驶的知识点!
 iPad无法与Mac屏幕连接,该如何解决?
iPad无法与Mac屏幕连接,该如何解决?
- 上一篇
- iPad无法与Mac屏幕连接,该如何解决?
- 下一篇
- 探索Ajax的五种提交方式的深入解析





-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 1547次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 1483次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 1431次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 1623次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 1611次使用
-
- AI写作工具免费版安装教程(含豆包Clawdbot)
- 2026-05-30 501浏览
-
- WPS AI能自动生成PPT吗?输入主题一键制作演示文稿
- 2026-05-27 501浏览
-
- Canva手机闪退解决方法及适配指南
- 2026-05-25 501浏览
-
- Hermes Agent依赖的工具链有哪些 必备工具链介绍
- 2026-05-05 501浏览
-
- 千问AI官网地址链接入口_千问AI官方网站登陆入口
- 2026-05-05 501浏览


