聚焦「视听触感官」协同配合的具身精细操纵,人大胡迪团队领衔探索机器人模态时变性挑战
来源:机器之心
2024-11-11 15:36:41
0浏览
收藏
哈喽!今天心血来潮给大家带来了《聚焦「视听触感官」协同配合的具身精细操纵,人大胡迪团队领衔探索机器人模态时变性挑战》,想必大家应该对科技周边都不陌生吧,那么阅读本文就都不会很困难,以下内容主要涉及到,若是你正在学习科技周边,千万别错过这篇文章~希望能帮助到你!

AIxiv专栏是本站发布学术、技术内容的栏目。过去数年,本站AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
本文作者来自于中国人民大学,深圳朝闻道科技有限公司以及中国电信人工智能研究院。其中第一作者冯若轩为中国人民大学二年级硕士生,主要研究方向为多模态具身智能,师从胡迪教授。
引言:在机器人操纵物体的过程中,不同传感器数据携带的噪声会对预测控制造成怎样的影响?中国人民大学高瓴人工智能学院 GeWu 实验室、朝闻道机器人和 TeleAI 最近的合作研究揭示并指出了 “模态时变性”(Modality Temporality)现象,通过捕捉并刻画各个模态质量随物体操纵过程的变化,提升不同信息在具身多模态交互的感知质量,可显著改善精细物体操纵的表现。论文已被 CoRL2024 接收并选为 Oral Presentation。
论文链接:https://arxiv.org/abs/2408.01366v2 项目主页:https://gewu-lab.github.io/MS-Bot/
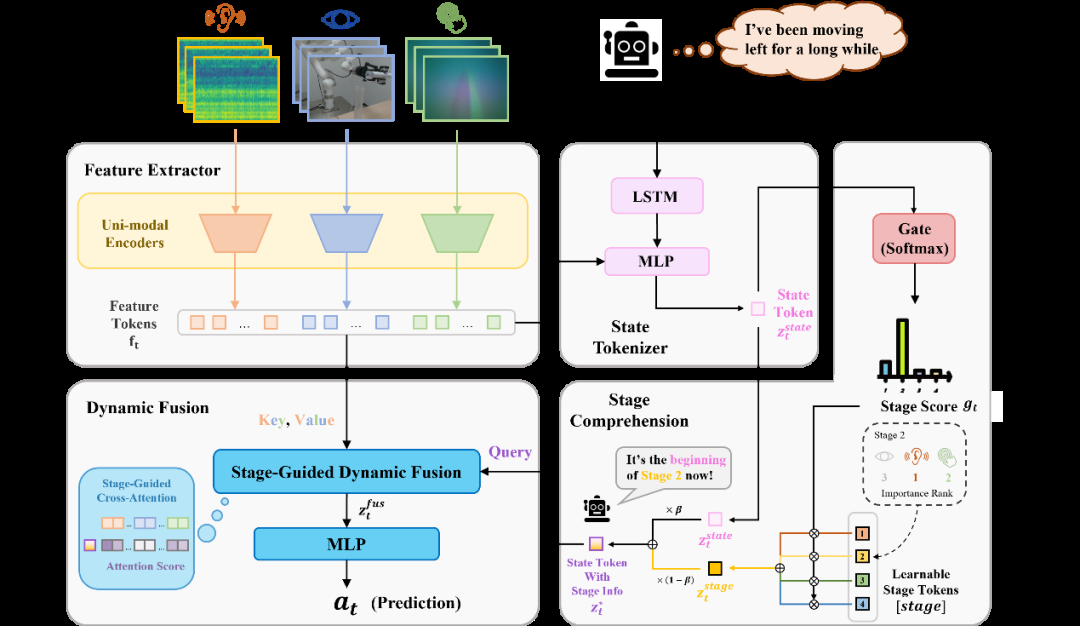
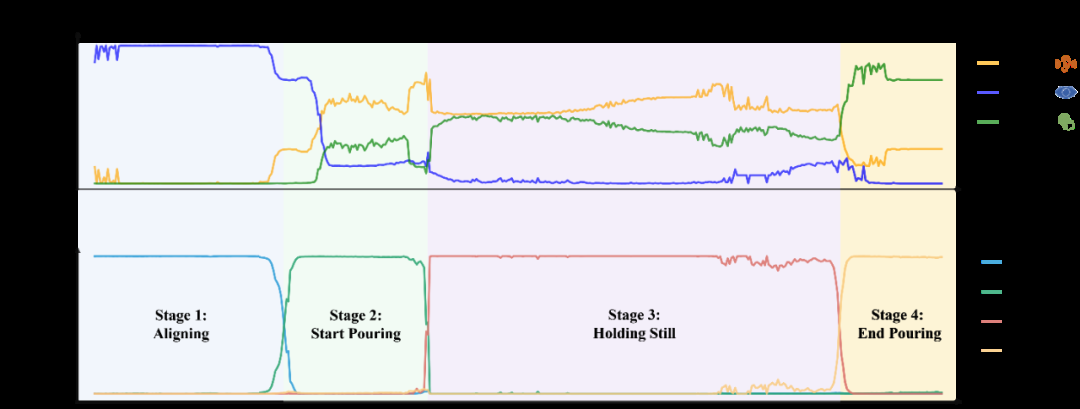
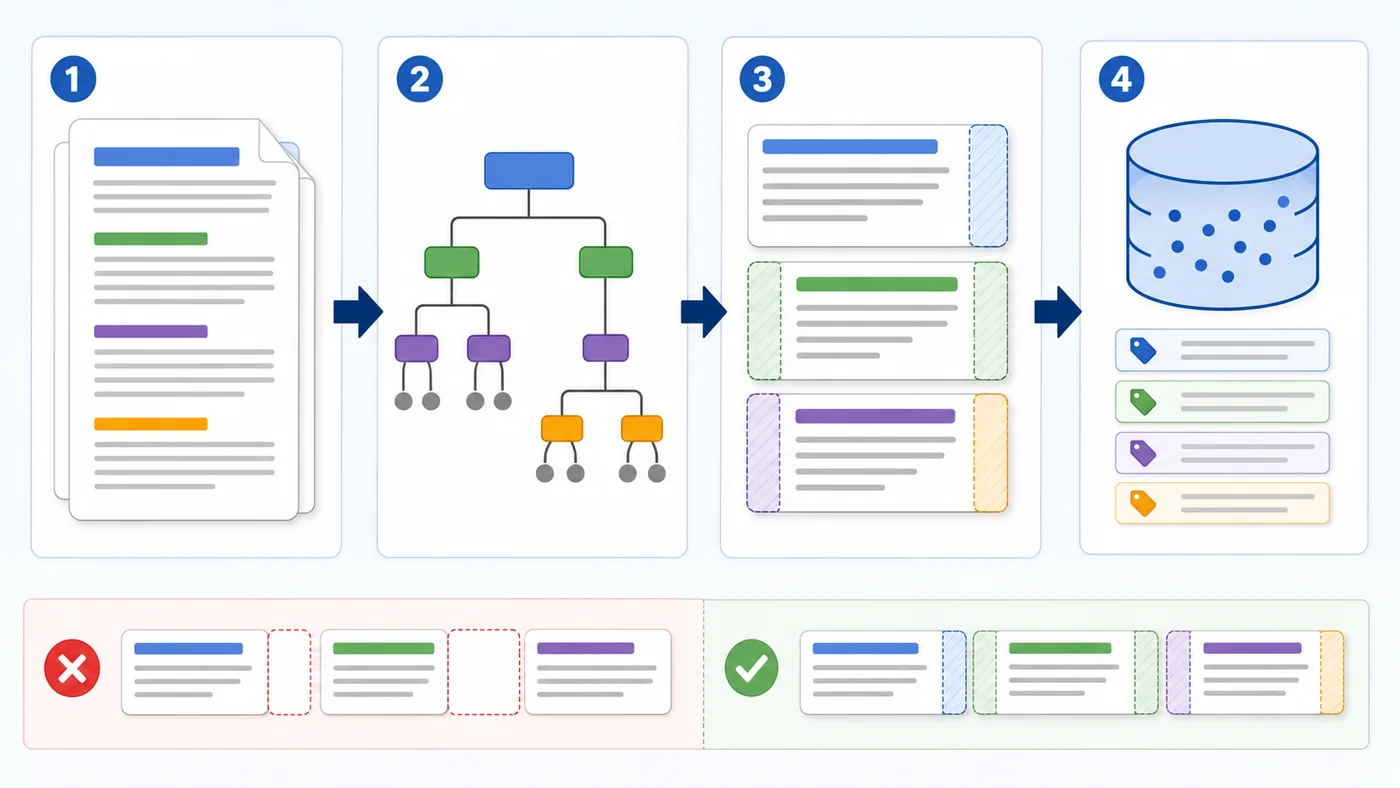
特征提取模块:该模块包含一系列单模态编码器,每个编码器都接受一段简短的单模态观测历史作为输入,并将它们编码为特征。 状态编码器:该模块旨在将各模态特征和动作历史序列编码为表示当前任务状态的 token。动作历史与人类记忆相似,可以帮助指示当前所处的任务状态。我们将动作历史输入到一个 LSTM 中,并通过一个 MLP 将它们与模态特征编码为状态 token。 阶段理解模块:该模块旨在通过将阶段信息注入状态 token 中,从而实现显式的由粗到细粒度的任务阶段理解。我们用一组可学习的阶段 token 来表示每个任务阶段,并通过一个门控网络(MLP)来预测当前所处的阶段,利用 Softmax 归一化后的阶段预测分数对阶段 token 进行加权融合,得到当前阶段 token。门控网络的训练以阶段标签作为监督信号,对非当前阶段的预测分数进行惩罚。我们还放松了对阶段边界附近的样本上的相邻阶段分数惩罚,从而实现软约束效果,得到更平滑的阶段预测。新的注入阶段信息后的状态 token 由原状态 token 和阶段 token 加权融合得到,可以表示任务阶段内的细粒度状态,从而对多传感器动态融合进行引导。 动态融合模块:该模块根据当前任务阶段的细粒度状态动态地选择关注的模态特征。我们以注入了阶段信息的状态 token 作为 Query,将模态特征作为 Key 和 Value 进行交叉注意力(Cross Attention)。该方法根据当前任务阶段的需求,将各模态的特征动态地整合到一个融合 token 中。最后,该融合 token 输入到策略网络(MLP)中预测下一个动作。我们还引入了随机注意力模糊机制,以一定概率将各单模态特征 token 上的注意力分数替换为相同的平均值,防止模型简单地记忆与注意力分数模式对应的动作。
今天关于《聚焦「视听触感官」协同配合的具身精细操纵,人大胡迪团队领衔探索机器人模态时变性挑战》的内容介绍就到此结束,如果有什么疑问或者建议,可以在golang学习网公众号下多多回复交流;文中若有不正之处,也希望回复留言以告知!
版本声明
本文转载于:机器之心 如有侵犯,请联系study_golang@163.com删除
 Dubbo 项目启动时出现 \"No provider available\" 错误怎么办?
Dubbo 项目启动时出现 \"No provider available\" 错误怎么办?
- 上一篇
- Dubbo 项目启动时出现 \"No provider available\" 错误怎么办?
- 下一篇
- 使用 Raku 接口的 Go 管道
查看更多
最新文章




查看更多
课程推荐
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
查看更多
AI推荐
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 646次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 668次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 626次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 792次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 779次使用
查看更多
相关文章
-
- GPT-4王者加冕!读图做题性能炸天,凭自己就能考上斯坦福
- 2023-04-25 501浏览
-
- 单块V100训练模型提速72倍!尤洋团队新成果获AAAI 2023杰出论文奖
- 2023-04-24 501浏览
-
- ChatGPT 真的会接管世界吗?
- 2023-04-13 501浏览
-
- VR的终极形态是「假眼」?Neuralink前联合创始人掏出新产品:科学之眼!
- 2023-04-30 501浏览
-
- 实现实时制造可视性优势有哪些?
- 2023-04-15 501浏览


