多重方式掌握编码器绝对定位的理解
哈喽!今天心血来潮给大家带来了《多重方式掌握编码器绝对定位的理解》,想必大家应该对文章都不陌生吧,那么阅读本文就都不会很困难,以下内容主要涉及到,若是你正在学习文章,千万别错过这篇文章~希望能帮助到你!
编码器是一种常用的位置传感器,可以用来测量旋转和线性运动的位移,并将其转换为数字信号。编码器的绝对定位功能可以让我们精确地知道物体的位置,因此在许多领域都有广泛的应用,比如机器人、汽车、医疗仪器等等。
理解编码器绝对定位的方法有很多种,其中比较常见的有以下几种:
- 二进制编码方法
二进制编码方法是一种将物理运动转换为数字信号的方式。编码器通过一个位置传感器来检测物体是否移动,并根据物体运动的位置改变其输出的数字编码。每个数字编码对应的是一个唯一的物理位置,因此我们可以通过读取编码器的输出来确定物体的位置。
下面是一个用Arduino实现的二进制编码器示例代码:
const int encoderPinA = 2;
const int encoderPinB = 3;
volatile int encoderPos = 0;
volatile bool aSet = false;
volatile bool bSet = false;
void setup() {
pinMode(encoderPinA, INPUT);
pinMode(encoderPinB, INPUT);
attachInterrupt(digitalPinToInterrupt(encoderPinA), updateEncoderA, CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinB), updateEncoderB, CHANGE);
}
void loop() {
// 读取编码器当前位置
int newPos = encoderPos;
Serial.println(newPos);
}
void updateEncoderA() {
aSet = digitalRead(encoderPinA);
if (aSet && !bSet) {
encoderPos++;
} else if (!aSet && bSet) {
encoderPos--;
}
bSet = digitalRead(encoderPinB);
}
void updateEncoderB() {
bSet = digitalRead(encoderPinB);
if (bSet && !aSet) {
encoderPos--;
} else if (!bSet && aSet) {
encoderPos++;
}
aSet = digitalRead(encoderPinA);
}- 格雷码编码方法
格雷码是一种二进制编码的变体,它的优点在于只有一个位置的变化会导致一个编码位的变化。格雷码编码器的输出与二进制编码器类似,但在对编码进行解码之前需要将其转换为二进制表示。这可以通过查找一个转换表来完成,或使用特定的解码器芯片来自动完成转换。
下面是一个使用Shift Register 74HC595实现的格雷码编码器示例代码:
const int encoderPinClock = 4;
const int encoderPinData = 5;
const int encoderPinLatch = 6;
unsigned int encoderValue = 0;
void setup() {
pinMode(encoderPinClock, OUTPUT);
pinMode(encoderPinData, OUTPUT);
pinMode(encoderPinLatch, OUTPUT);
}
void loop() {
// 读取编码器当前位置
unsigned int newPos = 0;
for (int i = 0; i < 16; i++) {
digitalWrite(encoderPinLatch, LOW);
shiftOut(encoderPinData, encoderPinClock, MSBFIRST, 1 << i);
digitalWrite(encoderPinLatch, HIGH);
delayMicroseconds(10);
newPos |= digitalRead(encoderPinData) << i;
}
encoderValue = newPos;
Serial.println(encoderValue);
}- PWM编码方法
PWM编码方法利用了脉冲宽度调制的原理,将编码器的输出信号转换为脉冲信号。每个脉冲宽度对应一个位置,因此我们可以通过读取脉冲宽度来确定位置。
下面是一个使用ESP32的PWM模块实现的PWM编码器示例代码:
const int encoderPin = 5;
volatile int encoderPos = 0;
volatile unsigned long lastPulseTime = 0;
void IRAM_ATTR pulseHandler() {
unsigned long pulseTime = micros();
if (pulseTime - lastPulseTime > 10) {
if (digitalRead(encoderPin) == HIGH) {
encoderPos--;
} else {
encoderPos++;
}
lastPulseTime = pulseTime;
}
}
void setup() {
pinMode(encoderPin, INPUT);
attachInterrupt(encoderPin, pulseHandler, CHANGE);
ledcSetup(0, 5000, 8);
ledcAttachPin(encoderPin, 0);
}
void loop() {
// 读取编码器当前位置
int newPos = map(ledcRead(0), 0, 255, -100, 100);
encoderPos = newPos;
Serial.println(encoderPos);
}总结
以上是三种常见的编码器绝对定位方法的代码示例。通过理解编码器的工作原理,我们可以更好地了解如何应用它来实现精确定位,从而在机器人、汽车、医疗仪器等领域提高生产效率和质量。
以上就是本文的全部内容了,是否有顺利帮助你解决问题?若是能给你带来学习上的帮助,请大家多多支持golang学习网!更多关于文章的相关知识,也可关注golang学习网公众号。
 学会解决LOL游戏无声音问题,小编教给你这些方法
学会解决LOL游戏无声音问题,小编教给你这些方法
- 上一篇
- 学会解决LOL游戏无声音问题,小编教给你这些方法
- 下一篇
- 使用pip命令轻松安装OpenCV学习教程
-

- 文章 · 前端 | 4天前 | 前端 · 性能优化 · css · Core Web Vitals · 渲染性能 · 前端 渲染性能 CSS性能 CLS content-visibility contain-intrinsic-size Layout
- 前端长页面渲染卡顿怎么排查:用 content-visibility 跳过离屏区块
- 430浏览 收藏
-

- 文章 · 前端 | 1星期前 | 前端 · javascript · AbortController · 表单提交 · AbortController 旧响应覆盖 前端重复提交 loading锁 fetch取消 按钮防抖
- 前端按钮重复提交怎么办:loading 锁和 AbortController 最小配方
- 442浏览 收藏
-
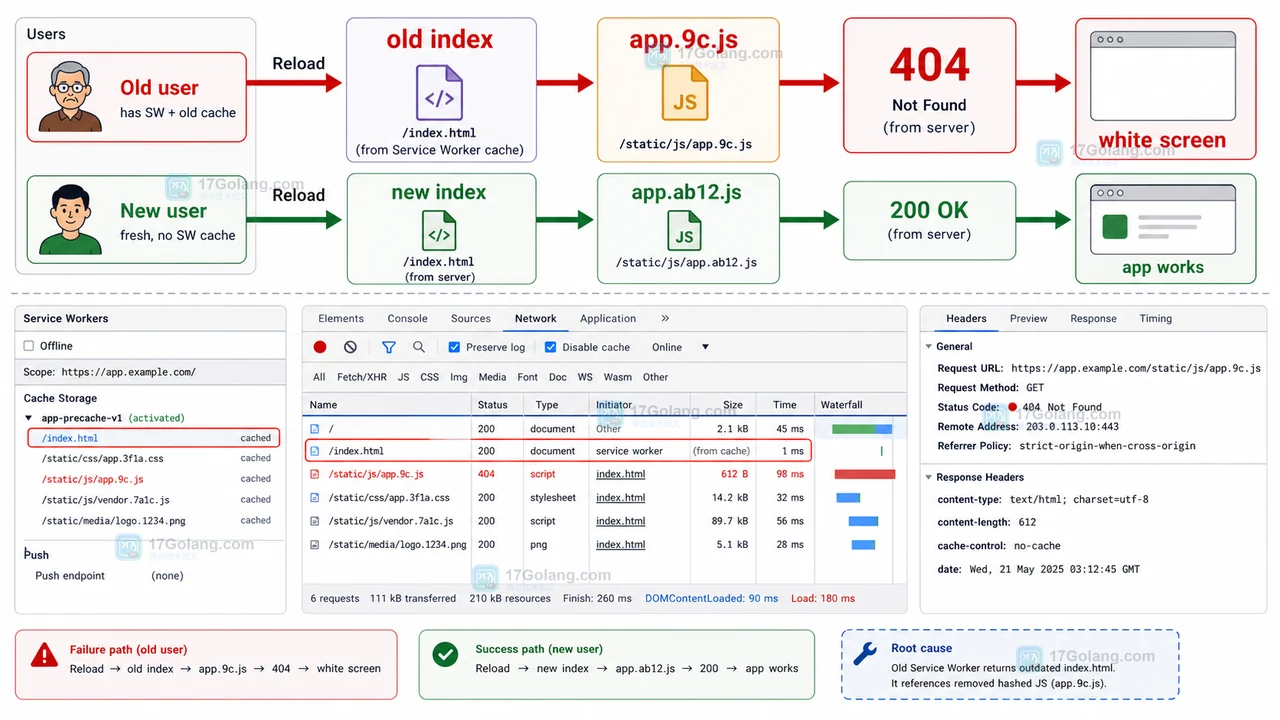
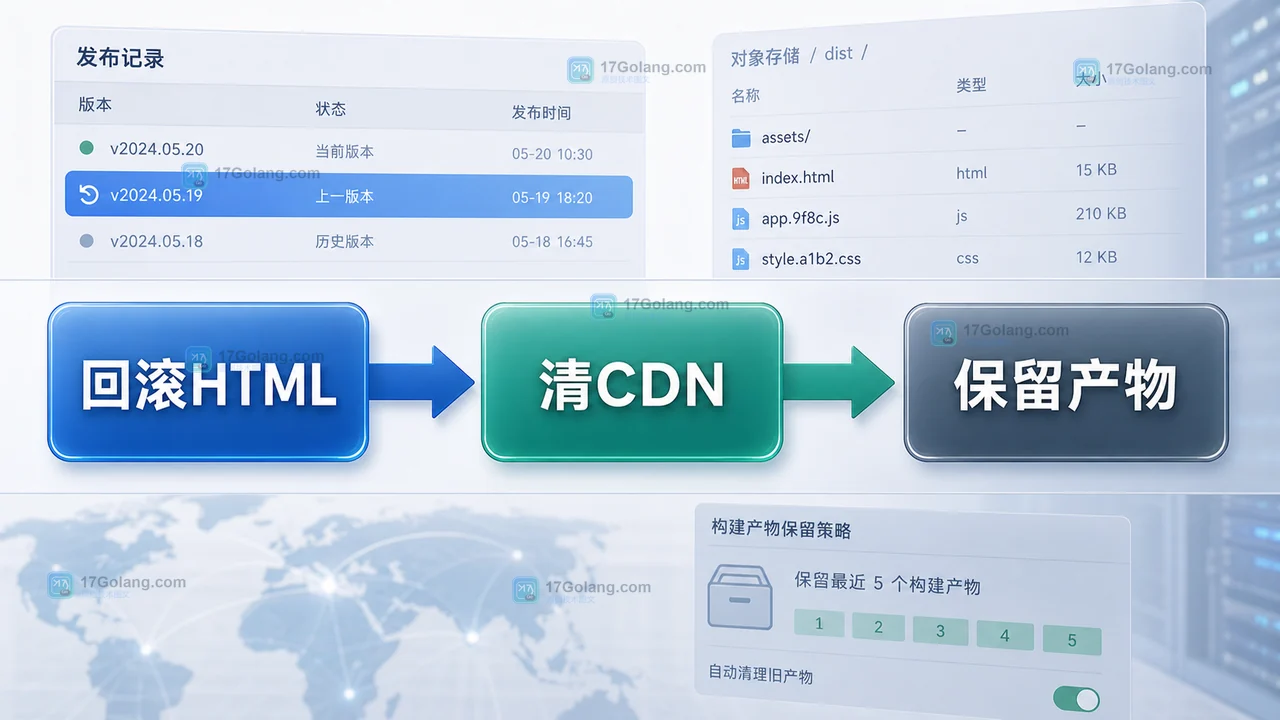
- 文章 · 前端 | 1星期前 | 前端 · 缓存 · Service Worker · 白屏 · 发布故障 · 缓存策略 前端白屏 Service Worker CacheStorage 资源404 发布回滚
- 前端发布后白屏复盘:Service Worker 缓存旧入口导致 JS 资源 404
- 469浏览 收藏
-
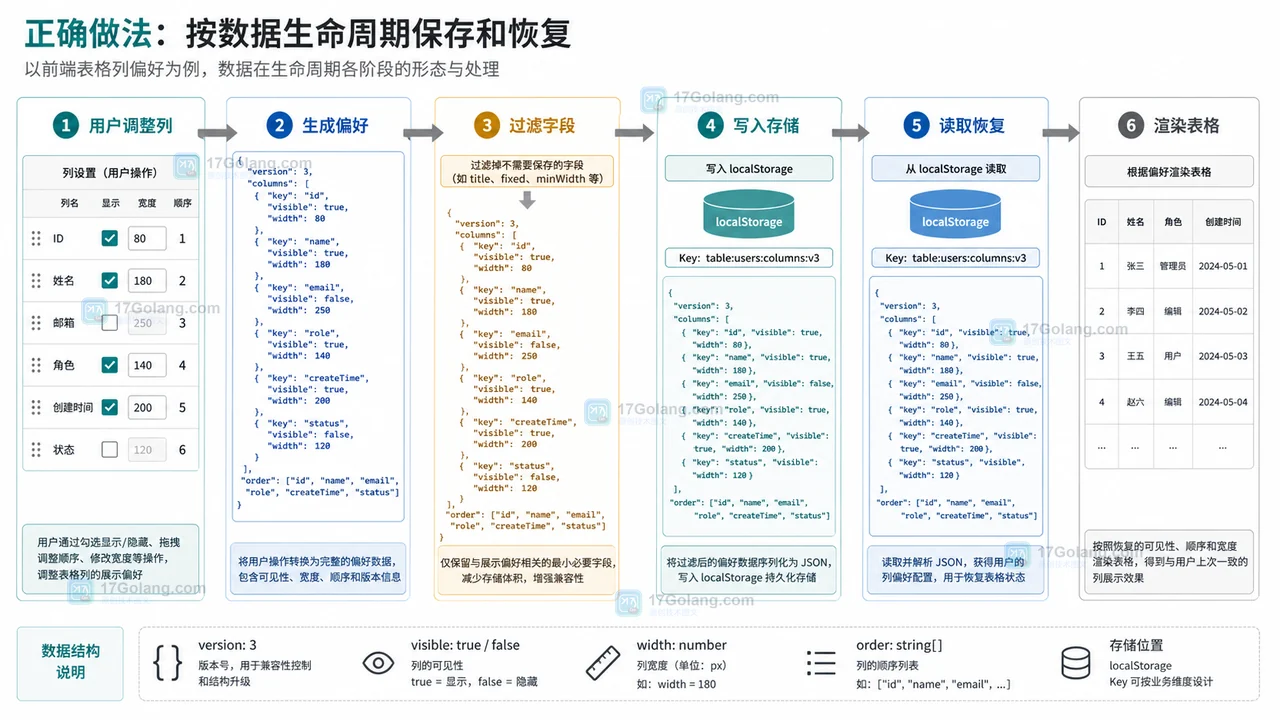
- 文章 · 前端 | 1星期前 | 前端开发 · localStorage · 表格配置 · 用户偏好 · 后台系统 · 用户偏好 localStorage 前端表格 列配置 可见列 列宽保存
- 前端表格列设置刷新后丢失怎么办:可见列、列宽和顺序这样保存
- 351浏览 收藏
-

- 文章 · 前端 | 1星期前 | 前端 · 接口排查 · 运维手册 · 性能告警 · 前端 AbortController 接口超时 Network瀑布图 降级回滚 线上告警
- 前端接口超时告警运行手册:从瀑布图到降级回滚
- 287浏览 收藏

-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 4429次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 4079次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 4064次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 4253次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 4223次使用
-
- JavaScript函数定义及示例详解
- 2025-05-11 502浏览
-
- CSS变量简化按钮悬停效果技巧
- 2026-05-31 501浏览
-
- JavaScript符号类型详解与应用
- 2026-05-31 501浏览
-
- HTML剪贴板复制粘贴怎么用
- 2026-05-26 501浏览
-
- data-*属性详解:HTML数据存储与DOM操作技巧
- 2026-05-25 501浏览


