ARCore姿态变换:自定义参考系详解
各位小伙伴们,大家好呀!看看今天我又给各位带来了什么文章?本文标题是《ARCore姿态变换:compose与inverse自定义参考系解析》,很明显是关于文章的文章哈哈哈,其中内容主要会涉及到等等,如果能帮到你,觉得很不错的话,欢迎各位多多点评和分享!
ARCore中,姿态(Pose)默认是相对于相机坐标系。本文将详细讲解如何利用`Pose`类的`compose()`和`inverse()`方法,将一个姿态从相机坐标系转换为相对于自定义的“中立”或“原点”姿态的坐标系。通过理论解析、代码示例及注意事项,帮助开发者精确控制AR对象的相对位置和方向,实现更灵活的AR体验。
ARCore中的姿态(Pose)与坐标系
在ARCore开发中,Pose对象是核心概念之一,它封装了3D空间中的位置(平移向量)和方向(四元数)。通常,当我们从ARCore获取一个Pose时(例如,通过Frame.getCamera().getPose()或Face.getCenterPose()),这个姿态是相对于当前设备相机坐标系(或更准确地说,是ARCore世界坐标系,但通常以相机作为参考点)来定义的。
然而,在许多AR应用场景中,我们可能需要一个对象相对于另一个特定点或姿态的位置和方向,而不是始终相对于相机。例如,我们可能想计算一个追踪到的面部相对于其初始位置的移动,或者一个虚拟对象相对于用户自定义的某个“原点”的偏移。这时,就需要进行姿态的相对变换。
理解Pose的compose()和inverse()方法
Pose类提供了两个关键方法来实现姿态的复合和反转:
Pose compose(Pose other): 这个方法用于将两个姿态进行复合。如果当前姿态P1表示从坐标系A到坐标系B的变换,而other姿态P2表示从坐标系B到坐标系C的变换,那么P1.compose(P2)将返回一个表示从坐标系A到坐标系C的变换的姿态。简单来说,它意味着“先应用P1,再应用P2”。
Pose inverse(): 这个方法返回当前姿态的反向变换。如果当前姿态P表示从坐标系A到坐标系B的变换,那么P.inverse()将返回一个表示从坐标系B到坐标系A的变换的姿态。它“撤销”了原始姿态的变换。
实现姿态的相对变换:从相机到自定义参考系
我们的目标是:给定一个姿态centerPose(相对于相机坐标系C),以及一个自定义的“中立”姿态neutralPose(也相对于相机坐标系C),我们想计算centerPose相对于neutralPose的姿态relativePose。
用数学或坐标系变换的思路来理解:
- neutralPose:表示从相机坐标系C到中立坐标系N的变换(或中立姿态N在C中的位置)。
- centerPose:表示从相机坐标系C到中心坐标系P的变换(或中心姿态P在C中的位置)。
- 我们想找到relativePose:表示从中立坐标系N到中心坐标系P的变换(或中心姿态P在N中的位置)。
要实现从N到P的变换,我们可以通过C作为中间桥梁:
- 首先,从N变换到C。这个变换是neutralPose的反向变换,即neutralPose.inverse()。
- 然后,从C变换到P。这个变换就是centerPose。
因此,将这两个变换复合起来,我们得到: relativePose = neutralPose.inverse().compose(centerPose)
示例代码
以下代码片段演示了如何在ARCore中计算一个姿态(例如,面部中心姿态)相对于初始中立姿态的相对位置和方向。
import com.google.ar.core.Pose;
// ... 其他必要的ARCore导入
public class ArRelativePoseCalculator {
// 用于存储作为参考点的中立姿态
private Pose neutralPose = null;
/**
* 设置或初始化中立姿态。
* 通常在首次检测到目标或用户指定某个点作为原点时调用。
*
* @param currentPose 当前的姿态,将被设置为新的中立参考姿态。
*/
public void setNeutralPose(Pose currentPose) {
// 确保只初始化一次,或根据应用逻辑进行重置
if (this.neutralPose == null) {
this.neutralPose = currentPose;
System.out.println("Neutral Pose initialized: " + currentPose);
}
}
/**
* 重置中立姿态,以便重新设置新的参考点。
*/
public void resetNeutralPose() {
this.neutralPose = null;
System.out.println("Neutral Pose reset.");
}
/**
* 计算给定姿态相对于已建立的中立姿态的相对姿态。
*
* @param currentPose 需要计算其相对位置的姿态(例如,实时的面部中心姿态)。
* @return 如果中立姿态已设置,返回currentPose相对于neutralPose的姿态;
* 否则,返回currentPose本身(它仍是相对于相机的)。
*/
public Pose getRelativePose(Pose currentPose) {
if (neutralPose == null) {
// 如果中立姿态尚未设置,则无法计算相对姿态,直接返回当前姿态
System.out.println("Neutral Pose not set. Returning current pose directly.");
return currentPose;
}
// 核心逻辑:
// 1. neutralPose.inverse(): 从中立姿态N的坐标系变换回相机C的坐标系。
// 2. .compose(currentPose): 接着从相机C的坐标系变换到当前姿态P的坐标系。
// 最终结果是:从N到P的变换。
Pose relativePose = neutralPose.inverse().compose(currentPose);
return relativePose;
}
// 示例用法:在ARCore的帧更新循环或特定回调中
public void onArFrameUpdate(Pose faceCenterPose) {
// 1. 在适当的时机(例如,首次检测到面部)初始化中立姿态
// 这里简化为每次更新都尝试设置,实际应用中应有更严谨的判断
if (neutralPose == null) {
setNeutralPose(faceCenterPose);
}
// 2. 获取面部姿态相对于中立姿态的相对位置和方向
Pose relativeFacePose = getRelativePose(faceCenterPose);
// 现在,relativeFacePose描述了面部相对于其初始“中立”位置的移动。
// 你可以使用这个relativeFacePose来:
// - 放置一个虚拟对象,使其跟随面部相对于初始位置的移动
// - 检测面部相对于初始位置的旋转或平移幅度
// - 实现虚拟面具的精确定位等
System.out.println("Current Face Pose (relative to camera): " + faceCenterPose);
System.out.println("Relative Face Pose (relative to neutral): " + relativeFacePose);
// 例如,如果relativeFacePose的平移向量接近(0,0,0)且旋转四元数接近单位四元数,
// 则表示面部仍在初始中立位置附近。
}
}错误尝试分析:centerPose.compose(neutralPose.inverse())
原始问题中提到了一种错误的尝试:centerPose.compose(neutralPose.inverse())。 让我们分析一下这个操作的含义:
- centerPose:表示从相机C到中心P的变换。
- neutralPose.inverse():表示从中立N到相机C的变换。
- centerPose.compose(neutralPose.inverse()):意味着“先应用centerPose(从C到P),再应用neutralPose.inverse()(从N到C)”。
- 这个操作链的起点是C,经过centerPose到达P。
- 然后从P继续应用neutralPose.inverse(),意味着从P到C的变换,再经过neutralPose.inverse(),但这个操作的物理意义变得模糊且不符合我们期望的“P相对于N”的定义。它不会将P变换到N的坐标系中,反而可能导致意料之外的位移和旋转,正如问题描述中“旋转头部导致显著的位置平移”所指出的那样。
注意事项与最佳实践
- 中立姿态的初始化时机:neutralPose的设置至关重要。它应该在你想将其作为参考原点的那一刻进行。这可能是在应用启动时、用户点击按钮时、首次检测到特定特征时,或达到某个稳定状态时。
- null检查:在调用getRelativePose之前,务必确保neutralPose已经初始化,否则会导致空指针异常或返回非预期的结果。
- 姿态与锚点(Anchor):如果你的“原点”需要固定在真实世界的某个物理位置,并且希望它能抵抗ARCore的漂移校正,那么使用Anchor可能比简单的Pose更合适。Anchor会持续更新其底层Pose以保持其在世界中的相对稳定性。然而,对于纯粹的相对姿态计算(例如,相对于某个时刻的面部姿态),Pose就足够了。
- 坐标系理解:始终清晰地理解每个Pose是相对于哪个坐标系定义的。这是避免混淆和错误的关键。
- 性能:compose()和inverse()操作是高效的,通常不会对AR应用的实时性能造成显著影响。
总结
通过正确运用ARCore Pose类的inverse()和compose()方法,开发者可以灵活地将姿态从默认的相机坐标系转换到自定义的参考坐标系。这种能力对于实现各种高级AR交互和视觉效果至关重要,例如相对运动跟踪、自定义UI定位以及基于用户初始姿态的体验调整。掌握neutralPose.inverse().compose(currentPose)这一模式,将极大地提升你在ARCore应用中处理空间变换的精确性和灵活性。
到这里,我们也就讲完了《ARCore姿态变换:自定义参考系详解》的内容了。个人认为,基础知识的学习和巩固,是为了更好的将其运用到项目中,欢迎关注golang学习网公众号,带你了解更多关于的知识点!
 PHP表单验证技巧大全
PHP表单验证技巧大全
- 上一篇
- PHP表单验证技巧大全

- 下一篇
- Java生成唯一UUID方法全解析
-
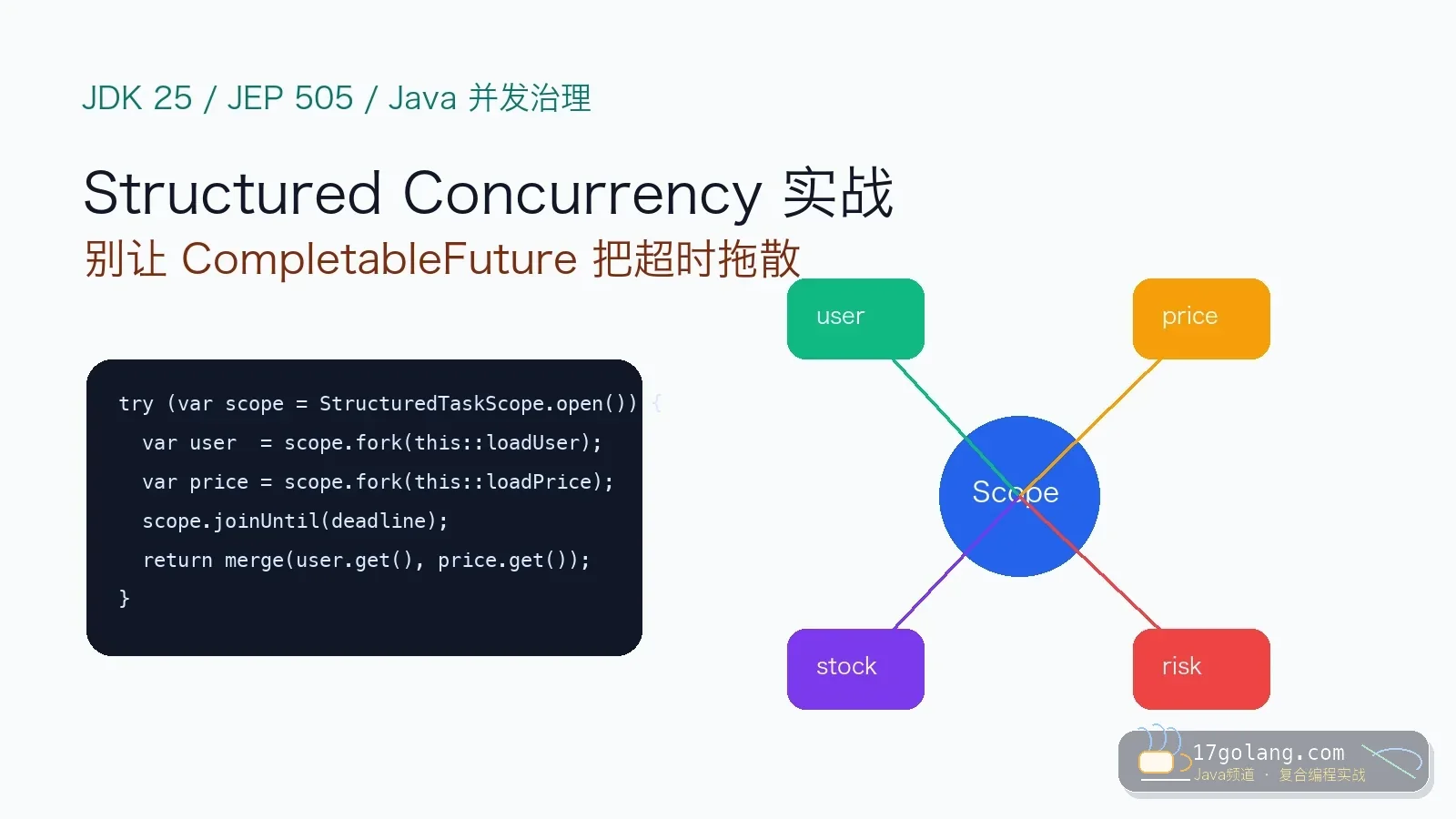
- 文章 · java教程 | 1天前 | 并发编程 · 生产实践 · Java教程 · JDK25 · 虚拟线程 · 虚拟线程 Java 25 JEP 505 Structured Concurrency StructuredTaskScope
- Java 25 Structured Concurrency 实战:别让 CompletableFuture 把超时拖散
- 443浏览 收藏
-
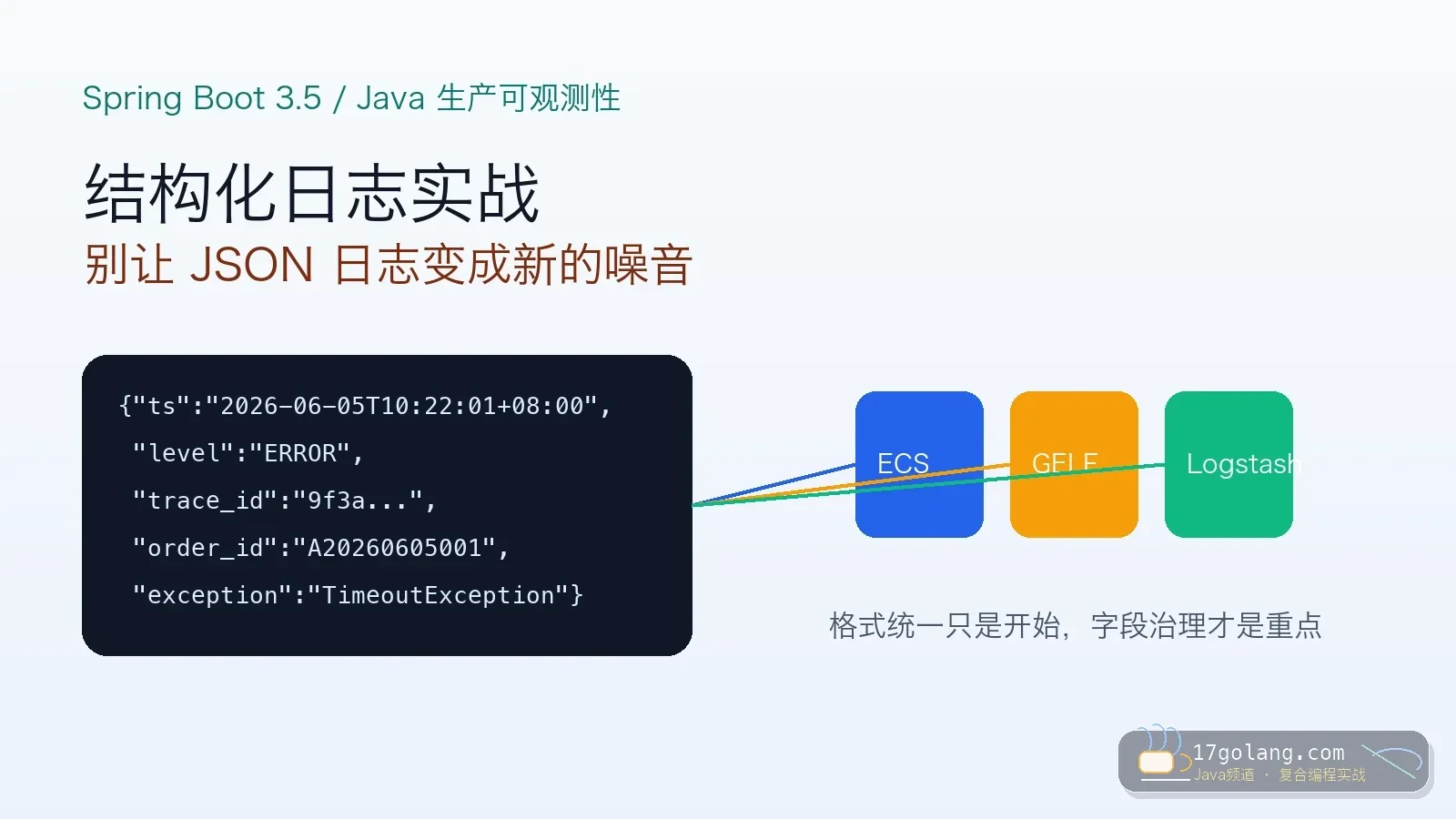
- 文章 · java教程 | 4天前 | 日志 · Spring Boot · 生产实践 · 可观测性 · Java教程 · java 可观测性 MDC 结构化日志 Spring Boot 3.5
- Spring Boot 3.5 结构化日志实战:别让 JSON 日志变成新的噪音
- 332浏览 收藏
-
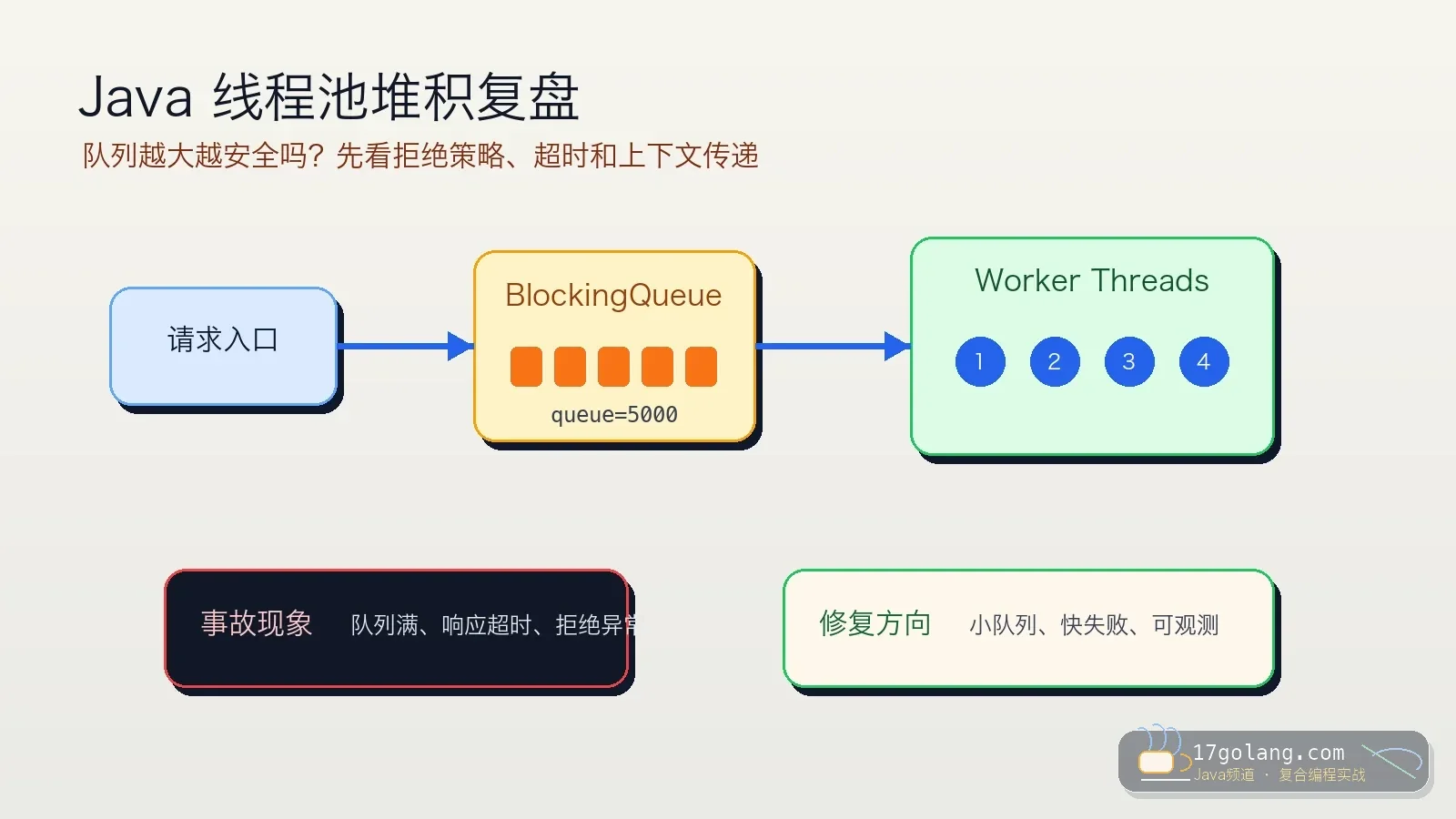
- 文章 · java教程 | 5天前 | 线程池 · Spring Boot · 生产实践 · Java教程 · ThreadPoolExecutor · java 性能优化 线程池 spring boot threadpoolexecutor
- Java 线程池队列堆积复盘:别让无界队列把慢故障藏起来
- 326浏览 收藏
-
- 文章 · java教程 | 5天前 | Spring Boot · 事务管理 · 生产实践 · Java教程 · Transactional · java 事务管理 spring boot 生产实践 Transactional
- @Transactional 失效复盘:自调用、异常回滚和异步线程别再踩坑
- 259浏览 收藏
-
- 文章 · java教程 | 5天前 | 微服务 · 生产实践 · Java教程 · Spring Cloud · OpenFeign · java 微服务 Spring Cloud 超时重试 OpenFeign
- OpenFeign 超时重试踩坑:别把慢下游重试成全链路雪崩
- 363浏览 收藏
-
- 文章 · java教程 | 5天前 | Spring Boot · 生产实践 · Java教程 · Micrometer · Actuator · java spring boot Micrometer 可观测性 actuator
- Spring Boot 指标告警实战:Actuator + Micrometer 让慢接口先暴露
- 240浏览 收藏
-
- 文章 · java教程 | 5天前 | 工程化 · Spring Boot · junit · Java教程 · Testcontainers · java 集成测试 spring boot JUnit 5 Testcontainers
- Spring Boot 集成测试别再只靠 H2:Testcontainers 落地踩坑复盘
- 154浏览 收藏
-
- 文章 · java教程 | 5天前 | 依赖管理 · Spring Boot · maven · 生产实践 · Java教程 · java maven spring boot 依赖冲突 工程化
- Maven 依赖冲突排查:NoSuchMethodError 不是玄学,先看依赖树
- 135浏览 收藏

-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ChatExcel酷表
- ChatExcel酷表是由北京大学团队打造的Excel聊天机器人,用自然语言操控表格,简化数据处理,告别繁琐操作,提升工作效率!适用于学生、上班族及政府人员。
- 7151次使用
-
- Any绘本
- 探索Any绘本(anypicturebook.com/zh),一款开源免费的AI绘本创作工具,基于Google Gemini与Flux AI模型,让您轻松创作个性化绘本。适用于家庭、教育、创作等多种场景,零门槛,高自由度,技术透明,本地可控。
- 7573次使用
-

- 可赞AI
- 可赞AI,AI驱动的办公可视化智能工具,助您轻松实现文本与可视化元素高效转化。无论是智能文档生成、多格式文本解析,还是一键生成专业图表、脑图、知识卡片,可赞AI都能让信息处理更清晰高效。覆盖数据汇报、会议纪要、内容营销等全场景,大幅提升办公效率,降低专业门槛,是您提升工作效率的得力助手。
- 7378次使用
-
- 星月写作
- 星月写作是国内首款聚焦中文网络小说创作的AI辅助工具,解决网文作者从构思到变现的全流程痛点。AI扫榜、专属模板、全链路适配,助力新人快速上手,资深作者效率倍增。
- 9319次使用
-
- MagicLight
- MagicLight.ai是全球首款叙事驱动型AI动画视频创作平台,专注于解决从故事想法到完整动画的全流程痛点。它通过自研AI模型,保障角色、风格、场景高度一致性,让零动画经验者也能高效产出专业级叙事内容。广泛适用于独立创作者、动画工作室、教育机构及企业营销,助您轻松实现创意落地与商业化。
- 8054次使用
-
- 提升Java功能开发效率的有力工具:微服务架构
- 2023-10-06 501浏览
-
- 掌握Java海康SDK二次开发的必备技巧
- 2023-10-01 501浏览
-
- 如何使用java实现桶排序算法
- 2023-10-03 501浏览
-
- Java开发实战经验:如何优化开发逻辑
- 2023-10-31 501浏览
-
- 如何使用Java中的Math.max()方法比较两个数的大小?
- 2023-11-18 501浏览


