RayTune训练AI大模型技巧全解析
一分耕耘,一分收获!既然打开了这篇文章《RayTune训练AI大模型技巧分享》,就坚持看下去吧!文中内容包含等等知识点...希望你能在阅读本文后,能真真实实学到知识或者帮你解决心中的疑惑,也欢迎大佬或者新人朋友们多留言评论,多给建议!谢谢!
RayTune通过分布式超参数优化解决大模型训练中的资源调度、搜索效率、实验管理与容错难题,其核心是利用并行化和智能调度(如ASHA、PBT)加速最优配置探索。首先,将训练逻辑封装为可调用函数,并在其中集成分布式训练(如PyTorch DDP);其次,定义超参数搜索空间与资源需求(如每试验2 GPU);再通过ASHA等调度器实现早期停止,提升搜索效率;最后借助检查点机制保障容错性。整个流程由Ray集群统一调度,实现高效、可复现的大模型超参优化。

在RayTune中训练AI大模型,核心思路在于利用其分布式特性来高效地探索超参数空间,尤其是在面对需要大量计算资源的复杂模型时。RayTune能够将不同超参数组合的训练任务并行化到集群中的多个节点或GPU上,并通过智能的调度算法,比如早期停止(Early Stopping)或种群训练(Population-Based Training, PBT),来快速识别并聚焦于那些有潜力的配置,从而大幅缩短找到最佳模型所需的时间。
解决方案
要高效地在RayTune中训练AI大模型并进行分布式超参数优化,我们首先需要理解RayTune是如何抽象和管理计算资源的。它允许你定义每个“试验”(trial)所需的CPU和GPU资源,然后Ray集群会负责调度这些试验到可用的工作节点上。对于大模型,这通常意味着每个试验可能需要多个GPU来运行分布式数据并行(DDP)训练,或者即使是单GPU训练,也需要足够大的显存和计算能力。
关键步骤包括:
- 准备可训练函数(Trainable Function):你的模型训练代码需要封装成一个函数或类,RayTune会反复调用它,每次传入不同的超参数配置。这个函数内部应能处理分布式训练的设置,例如,如果每个试验分配了多块GPU,那么你的训练代码(如PyTorch的
DistributedDataParallel或TensorFlow的MultiWorkerMirroredStrategy)就需要在函数内部正确初始化和使用这些GPU。 - 定义超参数搜索空间:使用
ray.tune.grid_search、ray.tune.rand_search、ray.tune.loguniform等API来定义你想要探索的超参数范围。对于大模型,这个空间可能会非常庞大,因此选择合适的搜索策略至关重要。 - 选择调度器(Scheduler)和搜索算法(Searcher):这是RayTune进行分布式优化的核心。调度器负责根据试验的性能决定是否提前停止表现不佳的试验,从而节省资源。搜索算法则负责在每次迭代中生成新的超参数配置。对于大模型,像
ASHAScheduler、HyperBandScheduler这样的早期停止策略,或者基于贝叶斯优化的HyperOptSearch、BOHB,甚至是动态调整超参数的PopulationBasedTraining,都能显著提升效率。 - 配置资源和并行度:通过
tune.run的resources_per_trial参数,明确告知RayTune每个试验需要多少CPU和GPU。例如,{"cpu": 4, "gpu": 2}表示每个试验分配4个CPU核心和2块GPU。RayTune会根据集群的可用资源,尽可能并行地运行多个试验。 - 实现检查点和恢复:大模型训练耗时,容易中断。在训练函数中定期保存检查点(checkpoint),并在RayTune配置中启用检查点恢复功能,可以确保即使集群出现故障,也能从上次保存的状态继续训练,避免从头开始。
说实话,整个流程下来,RayTune最吸引我的地方,就是它把这些复杂的分布式协调工作都给抽象掉了。我们作为开发者,更多地可以专注于模型本身和超参数空间的设计,而不是去头疼如何手动分配资源、同步状态这些底层细节。这简直就是生产力的一大解放。

RayTune在超大模型训练中究竟解决了哪些痛点?
坦白讲,在大模型训练的场景下,RayTune确实是解决了一系列让人头疼的问题,我个人觉得它主要攻克了以下几个痛点:
首先,资源管理和调度复杂性。想象一下,你要在几十块甚至上百块GPU的集群上跑几十上百个超参数组合的实验,手动去分配GPU、管理进程、确保每个实验都能拿到它需要的资源,这简直是噩梦。RayTune通过其底层的Ray框架,提供了一个统一的分布式计算抽象层。你只需要告诉它每个试验需要多少资源(比如2块GPU和4个CPU),它就能智能地在整个集群中调度这些任务,大大简化了资源管理。
其次,超参数空间探索效率低下。大模型训练一次成本极高,如果还用传统的网格搜索或随机搜索,那简直是浪费生命和金钱。RayTune集成了多种高级搜索算法和调度器,比如我很喜欢的ASHA(Asynchronous Successive Halving Algorithm)。ASHA的精髓在于“早停”:它会监控所有并行试验的性能,如果某个试验在早期阶段表现不佳,就直接把它砍掉,把资源腾给更有潜力的试验。这样一来,我们就能更快地聚焦到那些有希望的超参数组合上,极大地提高了探索效率。
再者,实验可复现性和管理。大模型的实验结果往往难以复现,而且随着试验数量的增多,管理每个试验的配置、日志、检查点就成了一团乱麻。RayTune提供了一套完整的实验跟踪系统。每次tune.run都会生成一个唯一的实验目录,里面包含了所有的配置信息、日志、以及模型检查点。通过Ray Dashboard,我们能实时监控所有试验的进展,查看各种指标曲线,甚至对比不同试验的表现。这对于科研和工程实践来说,简直是太方便了。
最后,故障恢复能力。大模型训练时间长,动辄几天甚至几周,中间网络波动、节点故障都是常有的事儿。如果训练中断了,从头再来简直是毁灭性的。RayTune支持断点续训,只要你在训练函数中正确地保存了检查点,并且在tune.run中配置了相应的恢复策略,那么即使训练意外中断,也能从上次的检查点继续,这大大提升了实验的健壮性。
选择合适的分布式超参数搜索策略,有哪些值得考量的点?
选择分布式超参数搜索策略,这事儿可不是拍脑袋就能定的,我个人在实践中会从几个维度去考量,因为不同的策略各有侧重,用错了可能效率反而更低。
首先,你的计算资源预算和时间窗口。这是最实际的问题。如果你的GPU集群资源有限,或者项目时间很紧张,那么你就需要选择那些样本效率更高的算法,也就是能在更少的试验次数内找到好结果的策略。比如,贝叶斯优化(如HyperOpt、BOHB)在这方面表现就不错,它们会根据之前试验的结果来智能地选择下一个要评估的超参数组合,避免盲目探索。而如果资源充足,时间也相对宽裕,那么一些并行度更高的策略,比如ASHA或HyperBand,就能充分利用集群优势,通过并行和早期停止来快速收敛。
其次,超参数空间的复杂度和维度。如果你的超参数空间非常庞大,比如几十个超参数,而且它们之间可能存在复杂的相互作用,那么简单的随机搜索可能就需要很长时间才能找到一个像样的结果。这时候,贝叶斯优化或基于梯度的优化方法会更有优势,它们能更好地在高维空间中进行探索。而如果超参数数量不多,或者你知道哪些超参数是关键的,随机搜索配合早期停止可能也是一个不错的起点。
再者,模型训练的单次成本。大模型的训练一次可能要好几个小时甚至几天。如果你的模型每次训练都耗时巨大,那么你绝对需要一个能够快速淘汰差配置的策略。像ASHA和HyperBand这类早期停止算法就非常适合,它们能及时“砍掉”那些在早期表现不佳的试验,避免不必要的资源浪费。相比之下,如果单次训练成本不高,你可以尝试更多种类的策略。
另外,你对超参数动态调整的需求。有些情况下,我们不只是想找到一组固定的最优超参数,而是希望在训练过程中能够动态地调整超参数。这时候,像PBT(Population-Based Training)这样的进化策略就显得非常强大。PBT允许多个模型并行训练,并在训练过程中周期性地“学习”和“借鉴”表现更好的模型的超参数,甚至复制它们的权重。这对于一些难以预设最优超参数的复杂模型来说,是一个非常具有探索性的选择。
最后,算法的实现成熟度和易用性。RayTune已经集成了很多主流的搜索算法和调度器。在选择时,我也会考虑这些算法在RayTune中的实现是否成熟、文档是否清晰、社区支持是否活跃。毕竟,我们希望把精力放在模型本身,而不是去调试搜索算法的底层实现。

在RayTune中,如何为大模型训练配置资源和并行化?
在大模型训练的场景下,合理配置资源和并行化是RayTune能否高效运行的关键。我个人觉得,这块儿的配置,既要考虑RayTune本身的调度机制,也要兼顾到你模型训练框架(比如PyTorch或TensorFlow)的分布式训练需求。
首先,最直接的资源配置是通过tune.run函数的resources_per_trial参数来完成。这个参数明确告诉RayTune每个独立的试验(也就是一个超参数组合下的模型训练任务)需要多少CPU和GPU。
import ray
from ray import tune
from ray.tune.schedulers import ASHAScheduler
import torch
import torch.nn as nn
import os
# 假设这是一个简化的大模型
class LargeModel(nn.Module):
def __init__(self, hidden_size):
super().__init__()
self.layer = nn.Linear(1024, hidden_size)
self.output = nn.Linear(hidden_size, 10)
def forward(self, x):
return self.output(torch.relu(self.layer(x)))
# 训练函数,RayTune会调用它
def train_large_model(config):
# 确保RayTune已经初始化,并获取当前trial的GPU ID
# 对于多GPU训练,需要在此处设置DDP环境
# 比如 PyTorch 的 DDP
if config["num_gpus_per_trial"] > 1:
# 获取当前worker的rank和world_size
# RayTune通常会设置RANK和WORLD_SIZE环境变量,或者可以通过ray.get_gpu_ids()来判断
# 注意:这里的DDP设置需要根据实际情况调整
os.environ["MASTER_ADDR"] = "localhost" # 假设单节点多GPU
os.environ["MASTER_PORT"] = "12355" # 随机端口
# ray.get_gpu_ids() 返回的是当前trial可用的GPU索引列表
local_rank = ray.get_gpu_ids()[0] # 假设每个worker只用一个GPU,但一个trial可能包含多个worker
# 如果一个trial内部是单进程多GPU,那么需要更复杂的逻辑
# 这里为了简化,假设config["num_gpus_per_trial"]代表DDP的world_size,且每个Ray actor只分配一个GPU
torch.distributed.init_process_group(
backend="nccl",
rank=local_rank, # 实际的rank应该由RayTune分配或从环境中获取
world_size=config["num_gpus_per_trial"]
)
torch.cuda.set_device(local_rank)
device = torch.device(f"cuda:{local_rank}")
else:
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = LargeModel(config["hidden_size"]).to(device)
if config["num_gpus_per_trial"] > 1:
model = nn.parallel.DistributedDataParallel(model, device_ids=[local_rank])
optimizer = torch.optim.Adam(model.parameters(), lr=config["lr"])
criterion = nn.CrossEntropyLoss()
# 模拟数据加载
dummy_input = torch.randn(config["batch_size"], 1024).to(device)
dummy_labels = torch.randint(0, 10, (config["batch_size"],)).to(device)
for epoch in range(config["epochs"]):
optimizer.zero_grad()
outputs = model(dummy_input)
loss = criterion(outputs, dummy_labels)
loss.backward()
optimizer.step()
# RayTune报告指标
tune.report(loss=loss.item(), epoch=epoch)
if config["num_gpus_per_trial"] > 1:
torch.distributed.destroy_process_group()
# 定义超参数搜索空间
search_space = {
"lr": tune.loguniform(1e-5, 1e-3),
"batch_size": tune.choice([64, 128, 256]),
"hidden_size": tune.choice([1024, 2048, 4096]),
"epochs": 5,
"num_gpus_per_trial": 2 # 每个试验需要2块GPU
}
# 设置调度器
scheduler = ASHAScheduler(
metric="loss",
mode="min",
max_t=search_space["epochs"],
grace_period=1,
reduction_factor=2
)
# 运行RayTune实验
analysis = tune.run(
train_large_model,
config=search_space,
num_samples=10, # 尝试10种不同的超参数组合
scheduler=scheduler,
# 关键:为每个试验分配资源。这里每个试验需要2块GPU和4个CPU核心。
resources_per_trial={"cpu": 4, "gpu": search_space["num_gpus_per_trial"]},
local_dir="./ray_results",
name="large_model_tuning",
# checkpoint_freq=1, # 每隔1个epoch保存一次检查点
# checkpoint_at_end=True # 训练结束时保存最终检查点
)
print("Best config: ", analysis.best_config)在这个例子中,resources_per_trial={"cpu": 4, "gpu": search_space["num_gpus_per_trial"]}是核心。它告诉RayTune,每一个超参数组合的训练任务,都需要分配4个CPU核心和由search_space["num_gpus_per_trial"]定义的GPU数量(这里是2块)。RayTune会在集群中寻找有足够资源的节点来启动这些试验,并尽可能地并行运行。
关于并行化,有几个细节需要注意:
- RayTune的试验并行:RayTune本身就是通过并行运行多个独立的试验来加速超参数搜索的。每个
resources_per_trial定义了一个试验的资源边界。如果你的集群有10块GPU,每个试验需要2块GPU,那么RayTune理论上可以同时运行5个试验。 - 单个试验内部的并行(DDP):对于大模型,单个试验内部可能还需要多GPU训练,比如使用PyTorch的
DistributedDataParallel(DDP) 或TensorFlow的MirroredStrategy。这意味着RayTune分配给一个试验的2块GPU,需要由该试验内部的DDP逻辑去协调使用。在我的示例代码中,我加入了简化的DDP初始化逻辑,但这部分需要你根据实际的深度学习框架和代码结构来仔细实现。RayTune会确保分配给你的GPU是可用的,并且通常会设置一些环境变量(如CUDA_VISIBLE_DEVICES)来帮助你的DDP代码识别和使用这些GPU。 - 集群配置:如果你是在一个多节点集群上运行,
到这里,我们也就讲完了《RayTune训练AI大模型技巧全解析》的内容了。个人认为,基础知识的学习和巩固,是为了更好的将其运用到项目中,欢迎关注golang学习网公众号,带你了解更多关于AI大模型,资源调度,RayTune,分布式超参数优化,早期停止的知识点!
 Gemini限制回答长度设置方法
Gemini限制回答长度设置方法
- 上一篇
- Gemini限制回答长度设置方法

- 下一篇
- WebVTT字幕格式详解与使用方法
-
- 科技周边 · 人工智能 | 1星期前 | 人工智能 · GenAI · opentelemetry · 可观测性 · AI工程 · 人工智能 链路追踪 GenAI OpenTelemetry AI可观测性 LLM网关 Token统计
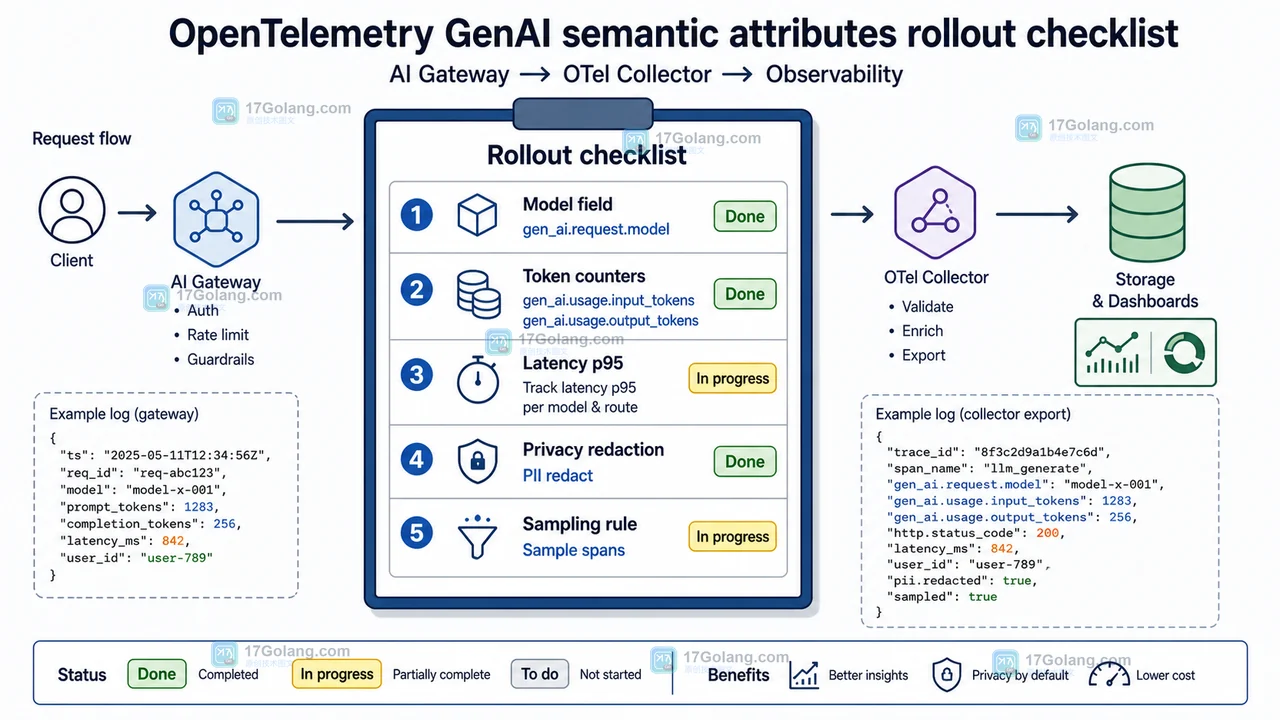
- AI 调用可观测架构:从散乱日志到 OpenTelemetry GenAI 字段统一
- 427浏览 收藏
-
- 科技周边 · 人工智能 | 1星期前 | 人工智能 · 前端流式输出 · AI聊天 · Fetch Stream · 前端 AI聊天 流式输出 ReadableStream TextDecoder Fetch Stream
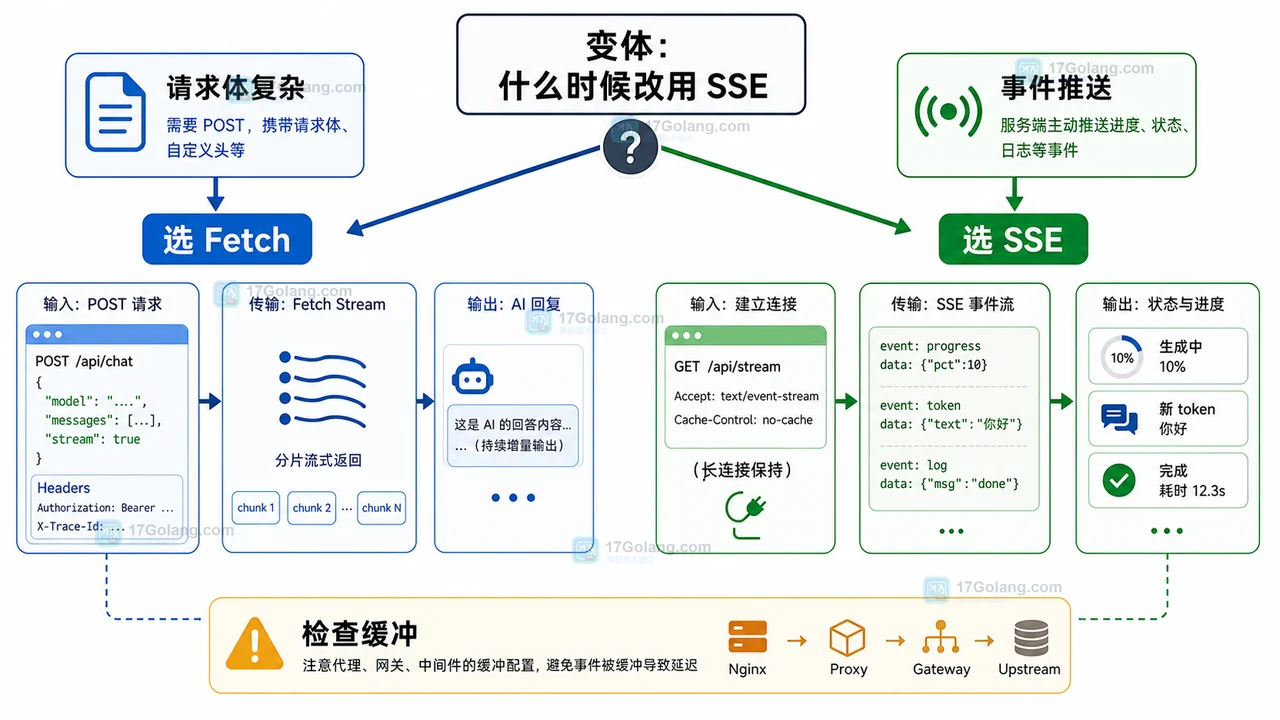
- AI 聊天流式输出前端配方:用 Fetch Stream 实现逐字渲染和中断控制
- 448浏览 收藏




-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 4414次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 4073次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 4058次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 4242次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 4217次使用
-
- AI写作工具免费版安装教程(含豆包Clawdbot)
- 2026-05-30 501浏览
-
- WPS AI能自动生成PPT吗?输入主题一键制作演示文稿
- 2026-05-27 501浏览
-
- Canva手机闪退解决方法及适配指南
- 2026-05-25 501浏览
-
- Hermes Agent依赖的工具链有哪些 必备工具链介绍
- 2026-05-05 501浏览
-
- 千问AI官网地址链接入口_千问AI官方网站登陆入口
- 2026-05-05 501浏览


