HTML5增强现实有哪些?4种WebAR技术解析
IT行业相对于一般传统行业,发展更新速度更快,一旦停止了学习,很快就会被行业所淘汰。所以我们需要踏踏实实的不断学习,精进自己的技术,尤其是初学者。今天golang学习网给大家整理了《HTML增强现实有哪些?4种WebAR实现方式解析》,聊聊,我们一起来看看吧!
WebAR通过浏览器实现增强现实体验,无需下载App。其核心依赖WebRTC获取视频流,WebGL渲染3D内容,WebXR实现空间感知;主要路径包括:1.基于图像识别的标记AR,适合营销与教育,但受限于标记;2.无标记AR利用SLAM技术构建环境地图,具备空间感但性能要求高;3.面部与手部追踪增强互动性,应用于滤镜与手势控制;4.位置AR结合GPS数据,适用于旅游与导览,但受定位精度限制。这些技术共同推动WebAR向更自然、沉浸的方向发展。

WebAR,也就是基于HTML的增强现实,简单来说,就是让你的浏览器直接变成一个AR眼镜。你不需要下载任何App,只要打开一个网页链接,就能通过手机或电脑的摄像头,看到虚拟内容叠加在真实世界之上。这听起来有点科幻,但实际上,它正悄然改变我们与数字内容的互动方式。对我来说,这不仅是技术的进步,更是一种体验的解放,因为它极大地降低了AR内容的触达门槛。

要实现WebAR,核心在于利用浏览器现有的能力。它并非依赖单一技术,而是一系列Web标准的巧妙组合。最基础的,我们需要通过WebRTC来获取摄像头的视频流;然后,利用WebGL来渲染3D模型和场景,把它们“画”到视频流上。而真正让这一切变得更智能、更具交互性的,是WebXR Device API这个新兴标准。它为开发者提供了统一的接口,来访问设备的姿态、环境光、深度信息,甚至更复杂的空间感知能力。可以说,WebXR是WebAR走向成熟的关键一步。
我们现在看到的WebAR,大致可以归结为几种主要的实现路径,每种都有其独特的应用场景和技术考量。从简单的图像识别到复杂的空间定位,它们各自展现了Web技术在增强现实领域的潜力。
基于图像识别的WebAR:快速入门与经典案例
这大概是WebAR里最“平易近人”的一种实现方式了。它的原理很简单:预先设定一张或多张图片作为“标记”(marker),当摄像头识别到这些标记时,就在标记上方或周围叠加预设的3D模型、视频或任何互动内容。AR.js就是这个领域的佼佼者,它基于Three.js和A-Frame,让开发者能以极低的门槛快速搭建一个基于标记的AR体验。
我个人觉得,AR.js的魅力在于它的轻量和高效。你甚至不需要太多的JavaScript知识,就能用A-Frame的声明式语法创建一个AR场景。比如,一个简单的HTML文件,引入AR.js库,然后定义一个a-marker标签,指向你的标记图片,再在里面放一个a-box或a-model,一个基本的AR体验就出来了。这种方式非常适合营销活动、产品展示或者教育领域,比如扫描书本上的图片就能看到3D模型。

当然,它的局限性也很明显。你必须得有那个特定的标记才能触发AR内容,这在自由度上就打了折扣。而且,如果光线不好或者标记被遮挡,识别效果会大打折扣。但对于很多场景来说,这种可控性反而是一种优势,能确保用户体验的稳定性。
无标记WebAR的探索:SLAM与环境感知
相比于依赖特定标记的AR,无标记AR无疑更具想象空间。它不需要任何预设的图片,而是通过摄像头实时分析周围环境,构建出三维空间地图(这也就是SLAM,即Simultaneous Localization and Mapping的精髓),从而实现虚拟物体在真实空间中的“锚定”。这意味着你可以把一个虚拟沙发放在你的客厅地板上,或者让一个虚拟角色在你的桌面上行走。
实现无标记WebAR的技术门槛要高得多。目前市面上,像8th Wall这样的商业解决方案走在前列,它们提供了强大的云端算力和SDK来处理复杂的SLAM算法。但随着WebXR Device API的不断完善,浏览器自身的能力也在增强。例如,WebXR的hit-test功能允许开发者检测虚拟射线与真实世界平面的交点,从而实现更自然的物体放置。
不过,这里面挑战可不少。首先是性能问题,实时SLAM计算对设备的CPU和GPU是个不小的考验,尤其是在移动端。其次是稳定性,环境光线变化、快速移动或者纹理较少的平面都可能导致追踪丢失。我曾经尝试过一些开源的SLAM库,在浏览器里跑起来效果并不理想,这让我意识到,要真正实现流畅、稳定的无标记WebAR,还有很长的路要走,很多细节需要打磨。但不可否认,这是WebAR未来发展的核心方向,它赋予了AR内容真正的“空间感”。
面部/手部追踪与位置AR:互动新维度
WebAR的魅力不仅仅在于空间定位,还在于其与人体的互动。面部追踪(Face Tracking)和手部追踪(Hand Tracking)就是典型的例子。你现在在社交媒体上看到的各种“滤镜”,很多底层技术就类似。在Web端,像Jeeliz FaceFilter这样的库,或者Google的MediaPipe,都能在浏览器中实现实时的面部关键点识别,从而让你给用户加上虚拟眼镜、帽子,或者改变他们的面部表情。这在虚拟试戴、娱乐互动领域有巨大的潜力。
手部追踪则更进一步,它能识别手势,让用户通过手势与虚拟物体进行交互,这为WebAR带来了更自然的输入方式。想象一下,你不需要点击屏幕,而是挥动手臂就能操控游戏,这体验感完全不同。
除了与人体的互动,位置AR(Location-based AR)也是一个很有意思的分支。它利用设备的GPS、指南针和加速计数据,将虚拟内容固定在真实的地理坐标上。比如,你走到一个特定公园,打开网页就能看到一个虚拟雕塑,或者根据你的位置显示附近的历史信息。这种AR更强调“探索”和“发现”的乐趣,非常适合旅游、城市导览或者户外游戏。
当然,这些技术也都面临各自的挑战。面部追踪对光线和面部角度敏感;手部追踪的精度和延迟需要优化。位置AR则受限于GPS的精度(尤其是在城市峡谷效应下)和指南针的校准问题。但正是这些挑战,促使开发者不断探索更稳定、更高效的解决方案,推动WebAR向更广阔的领域发展。
终于介绍完啦!小伙伴们,这篇关于《HTML5增强现实有哪些?4种WebAR技术解析》的介绍应该让你收获多多了吧!欢迎大家收藏或分享给更多需要学习的朋友吧~golang学习网公众号也会发布文章相关知识,快来关注吧!
 BOM电话拨号实现方法详解
BOM电话拨号实现方法详解
- 上一篇
- BOM电话拨号实现方法详解
- 下一篇
- 取消文件夹预览设置图文教程
-

- 文章 · 前端 | 1天前 | 定时器 · 前端 · 性能排查 · 接口请求 · 轮询 · setInterval · setInterval 页面可见性 clearInterval 前端轮询 请求堆积 定时器清理
- 前端轮询接口越打越多怎么办:从重复定时器到清理机制一步步排查
- 490浏览 收藏
-

- 文章 · 前端 | 1天前 | 前端 · 搜索框 · AbortController · 接口请求 · 状态管理 · Fetch AbortController 前端搜索 请求乱序 旧响应覆盖
- 前端搜索结果倒退怎么办:AbortController 取消旧请求和序号兜底
- 295浏览 收藏
-
- 文章 · 前端 | 1天前 | 前端 · 性能优化 · cls · 懒加载 · Core Web Vitals · 前端 图片懒加载 IntersectionObserver CLS 布局稳定
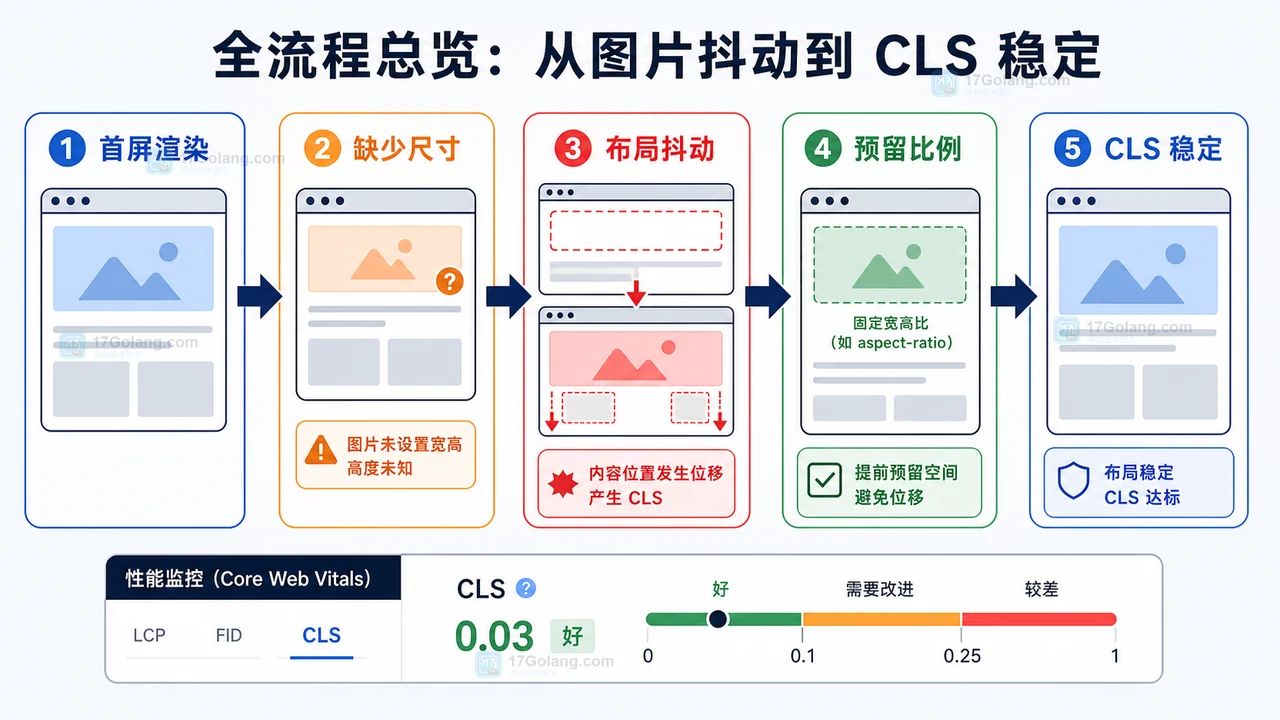
- 前端图片懒加载布局抖动治理完整流程:占位比例、按需加载和 CLS 复查
- 128浏览 收藏
-

- 文章 · 前端 | 2天前 | 工程化 · 前端 · javascript · css · 弹窗 · 前端 z-index 遮罩层 stacking context Portal 弹窗层级
- 前端弹窗层级治理工作流:从 z-index 混乱到 Portal 容器规范
- 350浏览 收藏
-

- 文章 · 前端 | 2天前 | 前端 · javascript · URL参数 · 列表筛选 · 页面状态 · 前端 筛选条件 列表页 history.replaceState URLSearchParams 刷新还原
- 前端筛选条件刷新后丢失怎么办:从内存状态到 URL 参数一步步排查
- 348浏览 收藏
-

- 文章 · 前端 | 2天前 | 前端 · 性能优化 · 路由 · javascript · 前端 用户体验 滚动位置 路由缓存 scrollRestoration
- 前端详情页返回列表丢失滚动位置怎么办:从复现到恢复一步步排查
- 458浏览 收藏


-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 542次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 554次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 511次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 687次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 667次使用
-
- JavaScript函数定义及示例详解
- 2025-05-11 502浏览
-
- 优化用户界面体验的秘密武器:CSS开发项目经验大揭秘
- 2023-11-03 501浏览
-
- 使用微信小程序实现图片轮播特效
- 2023-11-21 501浏览
-
- 解析sessionStorage的存储能力与限制
- 2024-01-11 501浏览
-
- 探索冒泡活动对于团队合作的推动力
- 2024-01-13 501浏览


