Golang私仓依赖管理:GOPRIVATE配置详解
一分耕耘,一分收获!既然都打开这篇《Golang私仓依赖管理:GOPRIVATE配置全解析》,就坚持看下去,学下去吧!本文主要会给大家讲到等等知识点,如果大家对本文有好的建议或者看到有不足之处,非常欢迎大家积极提出!在后续文章我会继续更新Golang相关的内容,希望对大家都有所帮助!
私有Go模块下载失败通常是因为GOPRIVATE未正确配置或认证机制不到位。核心解决步骤为:1. 明确私有模块路径,如github.com/your-org/private-repo;2. 设置GOPRIVATE环境变量包含这些路径并支持通配符;3. 确保Git通过SSH密钥(推荐)或HTTPS凭证能访问仓库;4. 检查网络或防火墙是否阻止VCS访问;5. 团队协作中统一GOPRIVATE配置并通过CI/CD安全注入环境变量和密钥。
在Go语言中,管理私有仓库依赖的核心在于正确配置GOPRIVATE环境变量,并确保Go能够通过相应的认证方式(如SSH密钥或HTTPS凭证)访问到这些私有代码库。GOPRIVATE的作用是告诉Go工具链哪些模块路径属于私有范畴,从而跳过公共Go模块代理和校验和数据库,直接尝试从版本控制系统(VCS)源头拉取代码。

解决方案
要让Go模块顺利管理私有仓库依赖,关键步骤可以概括为:

识别私有模块路径: 明确你的私有仓库的完整模块路径,例如
github.com/your-org/private-repo或git.yourcompany.com/project/module。配置
GOPRIVATE环境变量: 将这些私有模块路径添加到GOPRIVATE环境变量中。如果存在多个私有路径,可以使用逗号,分隔。同时,GOPRIVATE支持通配符*和**来匹配一组路径。
# 例如,所有来自 github.com/my-org 的仓库都是私有的 export GOPRIVATE="github.com/my-org/*" # 如果还有其他私有域名 export GOPRIVATE="github.com/my-org/*,git.mycompany.com/*"
确保认证机制到位: Go在尝试直接从VCS拉取私有模块时,会依赖于底层的Git(或其他VCS)客户端。因此,你需要确保Git能够访问你的私有仓库。
SSH方式 (推荐): 这是最常用也最安全的认证方式。确保你的SSH密钥已添加到SSH代理 (
ssh-agent),并且你的~/.ssh/config文件配置正确,允许Go通过SSH协议访问私有仓库。# 示例 ~/.ssh/config Host github.com IdentityFile ~/.ssh/id_rsa_github_private User git Host git.mycompany.com IdentityFile ~/.ssh/id_rsa_mycompany User git然后确保SSH代理运行并添加了密钥:
eval "$(ssh-agent -s)" ssh-add ~/.ssh/id_rsa_github_private # 或者 ssh-add ~/.ssh/id_rsa_mycompany
HTTPS方式: 如果你更倾向于HTTPS,Git需要有办法获取你的凭证。最常见的是通过Git的凭证助手 (
credential.helper)。# 例如,macOS上使用钥匙串存储凭证 git config --global credential.helper osxkeychain # 或者在Linux上使用缓存 git config --global credential.helper store # 警告:store 会将密码明文存储在文件中,不推荐用于敏感场景
当你第一次通过HTTPS访问私有仓库时,Git会提示你输入用户名和密码/Personal Access Token (PAT),并由凭证助手存储起来。
完成上述配置后,当你在项目中运行 go mod tidy 或 go get 时,Go会根据GOPRIVATE的指示,直接从私有仓库源拉取依赖。
为什么我的私有Go模块总是下载失败?理解GOPRIVATE的深层逻辑
遇到私有模块下载失败,这几乎是Go开发者绕不开的一个坎。很多人可能会觉得,我明明把代码放到了私有仓库,Go怎么就找不到呢?这背后其实涉及到Go模块代理(GOPROXY)和校验和数据库(sum.golang.org)的工作机制。
Go在默认情况下,会尝试通过GOPROXY环境变量指定的代理服务器来下载模块。如果GOPROXY配置的是https://proxy.golang.org,direct,那么Go会先尝试从官方代理下载。紧接着,下载到的模块还会与sum.golang.org上的校验和进行比对,以确保模块的完整性和安全性。
问题就出在这里:你的私有模块不可能存在于公共的Go模块代理上,更不会有公共的校验和记录。当Go尝试从代理获取私有模块时,自然会失败。GOPRIVATE的作用,就是在这里画一道清晰的界线。它告诉Go工具链:“嘿,看到这些路径了吗?它们是我的秘密花园,别去公共代理那里打听,也别去校验和数据库核对,直接找它们的老家!”
所以,当你的私有模块下载失败时,最常见的原因往往不是代码本身有问题,而是:
GOPRIVATE配置不完整或错误: 模块路径没有被GOPRIVATE正确匹配到,导致Go仍然尝试通过公共代理访问。- 认证失败: 即使
GOPRIVATE配置正确,Go直接去VCS源头拉取时,如果没有正确的SSH密钥或HTTPS凭证,Git也无法完成认证,自然就下载不了。这就像你找到了秘密花园的入口,却没有钥匙。 - 网络或防火墙问题: 极少数情况下,可能是你的网络环境或防火墙限制了对私有仓库VCS服务器的直接访问。
理解了GOPRIVATE是绕过公共服务,直接与VCS源头对话的“通行证”,你就能更好地排查和解决问题。它不仅仅是“私有”的标志,更是“信任我的本地配置,跳过公共基础设施”的指令。
GOPRIVATE配置的常见陷阱与高级用法:多模式匹配与Go Get的幕后故事
GOPRIVATE的配置看似简单,但实际使用中还是有一些值得注意的细节和高级用法。
首先是多模式匹配。如果你有来自多个来源的私有仓库,比如公司内部的GitLab实例和GitHub上的私有组织,你可以用逗号将它们分隔开:
export GOPRIVATE="github.com/my-company/*,gitlab.internal.com/*"
这里的*是通配符,它会匹配路径中的任何字符。**则可以匹配多层目录。比如,git.mycompany.com/**会匹配所有在git.mycompany.com域名下的任何层级的模块。这在企业环境中非常实用,你不需要为每个新项目都更新GOPRIVATE。
另一个常被忽略的细节是GOPRIVATE与GOPROXY的优先级关系。当一个模块路径被GOPRIVATE匹配到时,Go会完全忽略GOPROXY的设置,直接进行“直连”操作。这意味着,即使你的GOPROXY设置为off(完全禁用代理),如果GOPRIVATE没有正确配置,Go仍然会尝试从公共源下载那些它认为“不是私有”的模块。反之,如果GOPRIVATE匹配成功,Go会直接尝试通过Git等工具拉取,而不会受到GOPROXY的影响。
至于go get的“幕后故事”,当go get或go mod tidy遇到一个模块路径时,它会按以下大致流程处理:
- 检查
GOPRIVATE: 如果模块路径与GOPRIVATE中的任何模式匹配,Go会标记此模块为“私有”,并跳到步骤3。 - 检查
GOPROXY: 如果未被GOPRIVATE匹配,Go会尝试从GOPROXY指定的代理下载模块。 - 直接VCS拉取: 对于被
GOPRIVATE标记的模块,或者GOPROXY配置为direct且代理下载失败时,Go会尝试直接从版本控制系统(如Git)拉取代码。它会根据模块路径猜测VCS的URL(例如,github.com/user/repo会被猜测为https://github.com/user/repo.git或git@github.com:user/repo.git),然后调用本地安装的Git命令进行克隆。 - 认证: 在直接VCS拉取时,Go依赖于Git的认证机制。如果Git无法通过SSH密钥或HTTPS凭证进行认证,下载就会失败。
所以,当你调试私有模块问题时,除了GOPRIVATE,也别忘了检查你的Git配置和凭证。很多时候,问题不在Go本身,而在Git的认证环节。
团队协作中GOPRIVATE的最佳实践:统一配置与CI/CD环境考量
在团队协作和CI/CD流程中,GOPRIVATE的配置尤其重要,因为它直接影响到构建的一致性和自动化程度。
统一配置:
一个常见的痛点是,每个开发者的GOPRIVATE设置可能不一致,导致某些人在本地能正常构建,而另一些人或CI/CD环境却失败。为了避免这种混乱,最佳实践是:
- 文档化: 在项目的
README.md或内部文档中明确指出项目所需的GOPRIVATE配置。 - 环境变量管理: 鼓励团队成员使用工具(如
direnv)或脚本来自动设置项目相关的环境变量。例如,在项目根目录放置一个.envrc文件,其中包含export GOPRIVATE="...",direnv会在进入该目录时自动加载。 - 避免硬编码: 永远不要将敏感信息(如SSH密钥的路径或HTTPS凭证)硬编码到代码或公共配置文件中。
CI/CD环境考量:
CI/CD管道是自动化构建和测试的关键环节,它也需要正确配置GOPRIVATE和认证信息。
环境变量注入: 在CI/CD平台(如GitHub Actions, GitLab CI, Jenkins等)的配置中,通过其提供的环境变量管理功能,安全地设置
GOPRIVATE。# GitHub Actions 示例 jobs: build: runs-on: ubuntu-latest env: GOPRIVATE: "github.com/my-org/*,git.mycompany.com/*" steps: - uses: actions/checkout@v3 - name: Set up Go uses: actions/setup-go@v4 with: go-version: '1.20' - name: Download private modules run: go mod tidySSH密钥管理: 大多数CI/CD平台都支持将SSH私钥作为秘密变量(secrets)进行存储和注入。在CI/CD作业开始时,将私钥添加到
ssh-agent中,并配置~/.ssh/config,以便Git可以访问私有仓库。# GitLab CI 示例 variables: GOPRIVATE: "github.com/my-org/*" build: stage: build script: - eval $(ssh-agent -s) - echo "$SSH_PRIVATE_KEY" | ssh-add - # SSH_PRIVATE_KEY 是 GitLab CI/CD 变量中存储的私钥 - mkdir -p ~/.ssh - chmod 700 ~/.ssh - ssh-keyscan github.com >> ~/.ssh/known_hosts # 添加主机指纹,避免首次连接提示 - chmod 644 ~/.ssh/known_hosts - go mod tidy - go build ./...HTTPS凭证: 如果使用HTTPS,CI/CD环境通常需要一个Personal Access Token (PAT) 来代替密码。这个PAT也应作为秘密变量存储,并在Git配置中利用它进行认证。例如,对于GitHub,可以在URL中直接嵌入PAT(不推荐,因为会暴露在日志中),或者配置Git的
credential.helper。
在CI/CD环境中,遇到私有模块下载失败,常见错误通常是“Host key verification failed”或“Authentication failed”。前者通常是known_hosts文件缺失或不匹配,后者则是SSH密钥或HTTPS凭证配置不正确。细致的配置和测试是确保CI/CD流程顺畅的关键。
今天关于《Golang私仓依赖管理:GOPRIVATE配置详解》的内容就介绍到这里了,是不是学起来一目了然!想要了解更多关于的内容请关注golang学习网公众号!
 GeminiAPI密钥安全防护全攻略
GeminiAPI密钥安全防护全攻略
- 上一篇
- GeminiAPI密钥安全防护全攻略

- 下一篇
- 豆包AI配色工具,提升绘画美感技巧
-
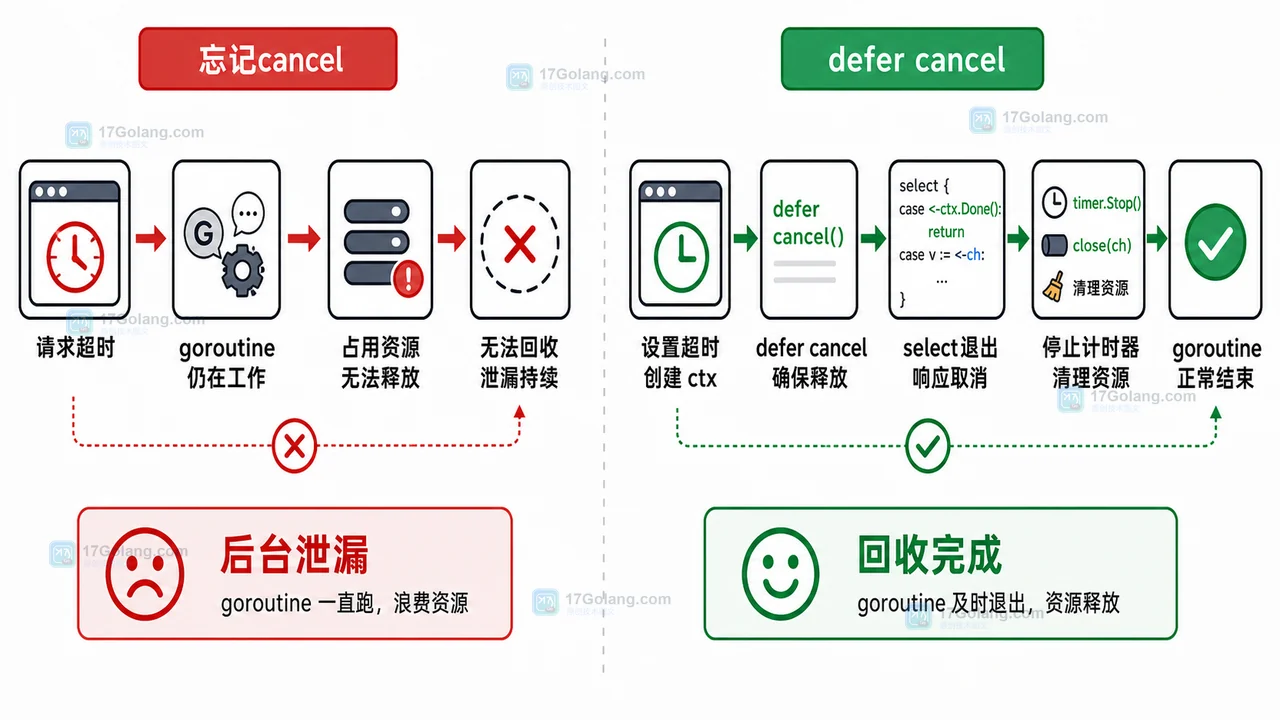
- Golang · Go教程 | 2天前 | goroutine · Context · 超时控制 · Go教程 · 后端开发 · Go Goroutine context 超时控制 WithTimeout Done QueryContext
- Go context 超时控制实战:从接口入口到 goroutine 回收的完整流程
- 166浏览 收藏
-
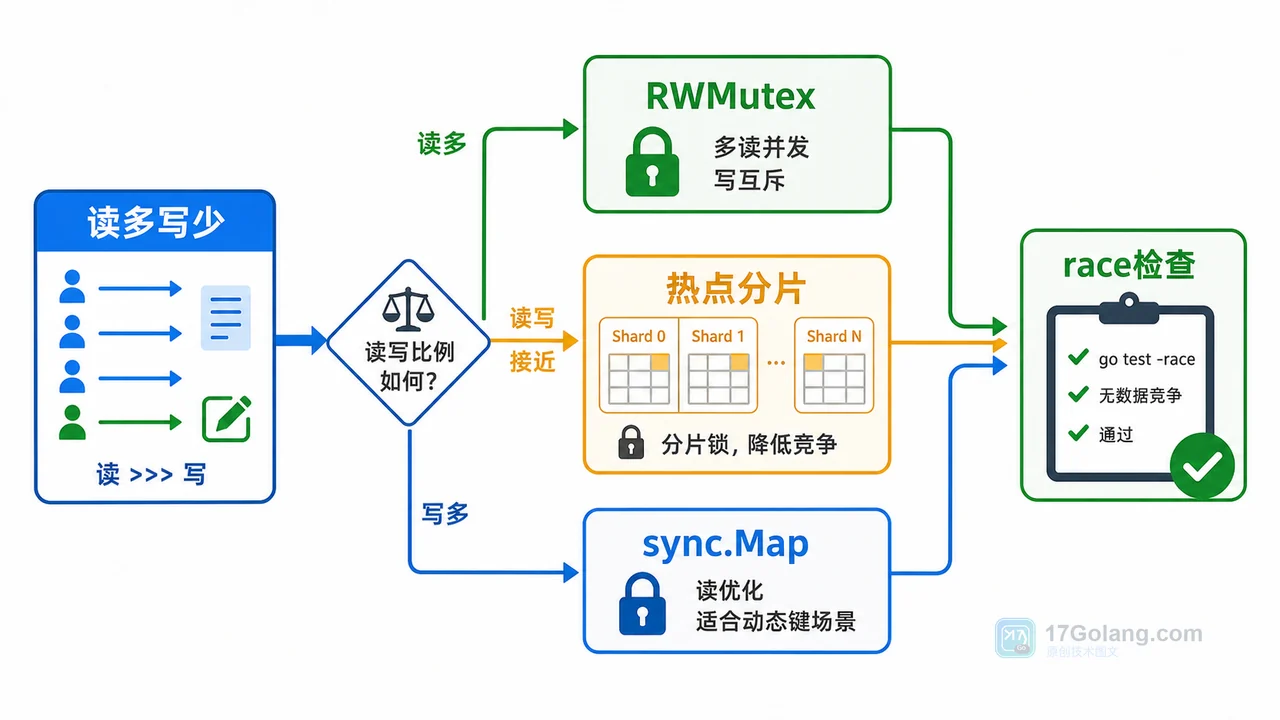
- Golang · Go教程 | 4天前 | map · 并发安全 · RWMutex · sync.Map · Go教程 · 并发安全 RWMutex sync.Map Go map并发读写 go test race
- Go map 并发读写崩溃怎么办:从复现报错到 RWMutex 修复的完整流程
- 272浏览 收藏
-
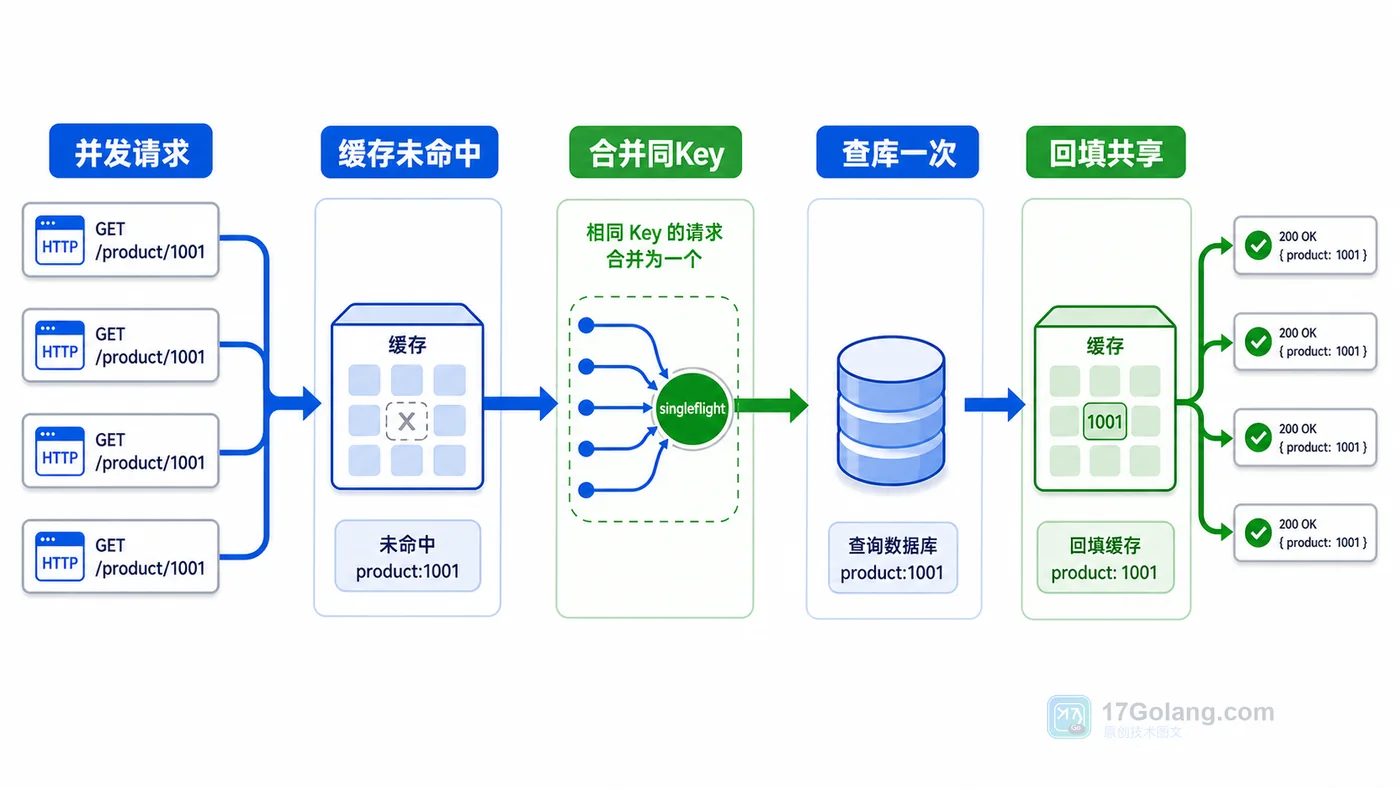
- Golang · Go教程 | 6天前 | singleflight · 并发控制 · Go教程 · 缓存治理 · 接口优化 · Go 并发请求 缓存击穿 singleflight 缓存回填
- Go singleflight 防缓存击穿实战:相同请求只查一次数据库
- 114浏览 收藏


-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 888次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 865次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 796次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 990次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 961次使用
-
- Java 性能优化上线清单:从定位、改造到灰度发布
- 2026-06-11 860浏览
-
- Spring Boot 压测验证:Gatling、JMeter 与性能回归门禁
- 2026-06-11 843浏览
-
- Java NMT 非堆内存排查:Direct Buffer、线程栈与 Metaspace 分析
- 2026-06-11 826浏览
-
- Spring Boot 容器内存优化:JVM 堆、非堆与 MaxRAMPercentage
- 2026-06-11 809浏览
-
- Tomcat 连接与线程参数调优:maxThreads、acceptCount 与 KeepAlive
- 2026-06-11 792浏览


