Sequelize多对多关联错误与解决技巧
在使用Sequelize构建多对多关联时,开发者可能会遇到`TypeError: Cannot read property 'field' of undefined`错误。本文深入剖析了该错误产生的两大核心原因:模型主键定义不明确以及不恰当使用`removeAttribute('id')`方法。通过详细的代码示例和解释,本文旨在帮助开发者理解Sequelize多对多关联的原理,并提供修正后的代码示例,确保模型主键定义与迁移文件一致,避免不必要的`removeAttribute('id')`调用。此外,文章还强调了`foreignKey`和`otherKey`在`belongsToMany`关联中的重要性,助力开发者正确配置Sequelize模型,从而保证多对多关联的稳定性和可靠性,提升开发效率。
1. 理解Sequelize多对多关联
在数据库设计中,多对多(Many-to-Many)关系是一种常见的关联类型,例如角色(Roles)与权限(Accesses)之间的关系,一个角色可以拥有多个权限,一个权限也可以被多个角色拥有。在Sequelize中,这种关系通常通过一个“中间表”(Junction Table或Through Table)来实现。
例如,RoleList 模型和 AccessList 模型通过 RolePermission 中间表进行关联。
- RoleList (角色列表)
- AccessList (权限列表)
- RolePermission (角色权限关联表)
Sequelize提供了belongsToMany方法来定义这种关联。当定义 RoleList.belongsToMany(AccessList, { through: RolePermission, foreignKey: 'role_name' }) 时,Sequelize会尝试根据配置找到关联模型的正确字段,特别是目标模型(AccessList)的主键。反之亦然,当定义 AccessList.belongsToMany(RoleList, { through: RolePermission, foreignKey: 'access_id' }) 时,Sequelize会查找目标模型(RoleList)的主键。
2. 错误分析:TypeError: Cannot read property 'field' of undefined
在Sequelize中,当尝试建立belongsToMany关联时,如果遇到TypeError: Cannot read property 'field' of undefined at new BelongsToMany ... this.target.rawAttributes[this.targetKey].field这样的错误,这通常意味着Sequelize无法正确识别目标模型(target)的主键(targetKey)属性。
具体来说,在AccessList.belongsToMany(models.RoleList, ...)这条关联定义中,RoleList是目标模型。Sequelize会尝试访问RoleList.rawAttributes[RoleList的主键].field来确定关联字段。如果RoleList模型的主键没有被正确定义,或者Sequelize无法通过targetKey找到对应的属性定义,就会导致this.target.rawAttributes[this.targetKey]为undefined,进而尝试访问undefined的field属性时抛出TypeError。
根据提供的代码和错误信息,导致此问题的主要原因有两点:
2.1 主键定义不明确
在RoleList模型的定义中,name字段在迁移文件中被定义为主键:
// role-list-migration.js
await queryInterface.createTable('RoleLists', {
name: {
allowNull: false,
primaryKey: true, // 这里明确了name是主键
type: Sequelize.STRING
},
// ...
});然而,在RoleList模型文件中,name字段在init方法中没有明确声明为primaryKey: true:
// role-model.js (原始错误代码)
RoleList.init({
name: DataTypes.STRING, // 缺少 primaryKey: true
}, {
sequelize,
modelName: 'RoleList',
tableName: 'RoleLists',
});Sequelize在处理模型关联时,会依赖模型定义中声明的主键信息。如果模型定义与迁移文件中的主键不一致,或者主键未明确指定,Sequelize就无法正确识别目标模型的主键字段,从而导致上述TypeError。
修正方法: 在RoleList模型的init方法中,明确将name字段定义为主键。
// role-model.js (修正后)
'use strict';
const {
Model
} = require('sequelize');
module.exports = (sequelize, DataTypes) => {
class RoleList extends Model {
static associate(models) {
RoleList.belongsToMany(models.AccessList, {
through: models.RolePermission,
foreignKey: 'role_name',
otherKey: 'access_id' // 明确otherKey,提高可读性
});
}
}
RoleList.init({
name: {
allowNull: false,
primaryKey: true, // 关键修正:明确name是主键
type: DataTypes.STRING,
}
}, {
sequelize,
modelName: 'RoleList',
tableName: 'RoleLists',
});
// RoleList.removeAttribute('id'); // 此行应移除,见下文解释
return RoleList;
};2.2 不恰当使用removeAttribute('id')
在RoleList和RolePermission模型中都使用了removeAttribute('id')。
RoleList模型中的removeAttribute('id'): 由于RoleList的迁移文件明确将name定义为主键,并且没有id字段,因此在模型中调用removeAttribute('id')是多余的,但并非直接导致TypeError的原因。然而,如果name没有被正确声明为主键,同时又移除了id(即使id不存在),可能会导致Sequelize在内部处理时找不到任何明确的主键,从而引发其他问题。最佳实践是,如果模型没有id字段且有明确的自定义主键,则无需调用此方法。
RolePermission模型中的removeAttribute('id'): RolePermission的迁移文件明确定义了id作为主键:
// role-permissions-migrations.js await queryInterface.createTable('RolePermissions', { id: { allowNull: false, autoIncrement: true, primaryKey: true, type: Sequelize.INTEGER }, // ... });但RolePermission模型却调用了removeAttribute('id'):
// role-permission-model.js (原始错误代码) RolePermission.init({ // ... }, { sequelize, modelName: 'RolePermission', tableName: 'RolePermissions', }); RolePermission.removeAttribute('id'); // 错误:移除了实际存在的主键这导致模型层面上RolePermission失去了其主键,这对于Sequelize管理中间表至关重要。中间表作为关联的一部分,其自身也需要一个稳定的主键来确保数据完整性和Sequelize的内部操作。
修正方法: 移除RoleList和RolePermission模型中的removeAttribute('id')调用。
// role-permission-model.js (修正后)
'use strict';
const {
Model
} = require('sequelize');
module.exports = (sequelize, DataTypes) => {
class RolePermission extends Model {
static associate(models) {
// RolePermission作为through模型,通常不需要定义自己的associate方法
// 如果需要,这里可以定义与RoleList和AccessList的belongsTo关联
}
}
RolePermission.init({
role_name: {
type: DataTypes.STRING,
onDelete: 'CASCADE',
references: {
model: "RoleLists",
key: "name",
as: 'role_name'
}
},
access_id: {
type: DataTypes.INTEGER,
onDelete: 'CASCADE',
references: {
model: "AccessLists",
key: "id"
}
},
}, {
sequelize,
modelName: 'RolePermission',
tableName: 'RolePermissions',
});
// RolePermission.removeAttribute('id'); // 关键修正:移除此行,保留id作为主键
return RolePermission;
};3. 关联定义最佳实践
除了上述修正,确保belongsToMany关联的foreignKey和otherKey(可选,但推荐明确)参数与中间表中的外键字段名保持一致。
// role-model.js (完整修正后的associate方法)
class RoleList extends Model {
static associate(models) {
RoleList.belongsToMany(models.AccessList, {
through: models.RolePermission,
foreignKey: 'role_name', // RoleList在RolePermission中的外键
otherKey: 'access_id' // AccessList在RolePermission中的外键
});
}
}
// permission-model.js (完整修正后的associate方法)
class AccessList extends Model {
static associate(models) {
AccessList.belongsToMany(models.RoleList, {
through: models.RolePermission,
foreignKey: 'access_id', // AccessList在RolePermission中的外键
otherKey: 'role_name' // RoleList在RolePermission中的外键
});
}
}注意:
- foreignKey:指定当前模型(调用belongsToMany的模型)在中间表中的外键。
- otherKey:指定目标模型(belongsToMany的第一个参数)在中间表中的外键。
4. 总结与注意事项
解决Sequelize belongsToMany关联中的TypeError: Cannot read property 'field' of undefined错误,关键在于:
- 确保模型主键定义与迁移文件一致:如果模型有自定义主键(非id),务必在Model.init()中通过primaryKey: true明确声明该字段为主键。
- 谨慎使用removeAttribute('id'):
- 对于拥有自定义主键且迁移文件中没有id字段的模型,removeAttribute('id')是多余的,可以移除。
- 对于迁移文件定义了id作为主键的模型(尤其是中间表),绝不能在模型中调用removeAttribute('id'),否则会导致模型失去主键,引发关联问题。
- 明确foreignKey和otherKey:在belongsToMany关联中,清晰地指定foreignKey和otherKey可以提高代码的可读性,并帮助Sequelize正确建立关联。
遵循这些最佳实践,可以有效避免Sequelize多对多关联中常见的配置问题,确保应用的稳定运行。在遇到类似错误时,应首先检查涉及关联的各个模型的主键定义是否正确,以及是否存在不当的removeAttribute('id')调用。
好了,本文到此结束,带大家了解了《Sequelize多对多关联错误与解决技巧》,希望本文对你有所帮助!关注golang学习网公众号,给大家分享更多文章知识!
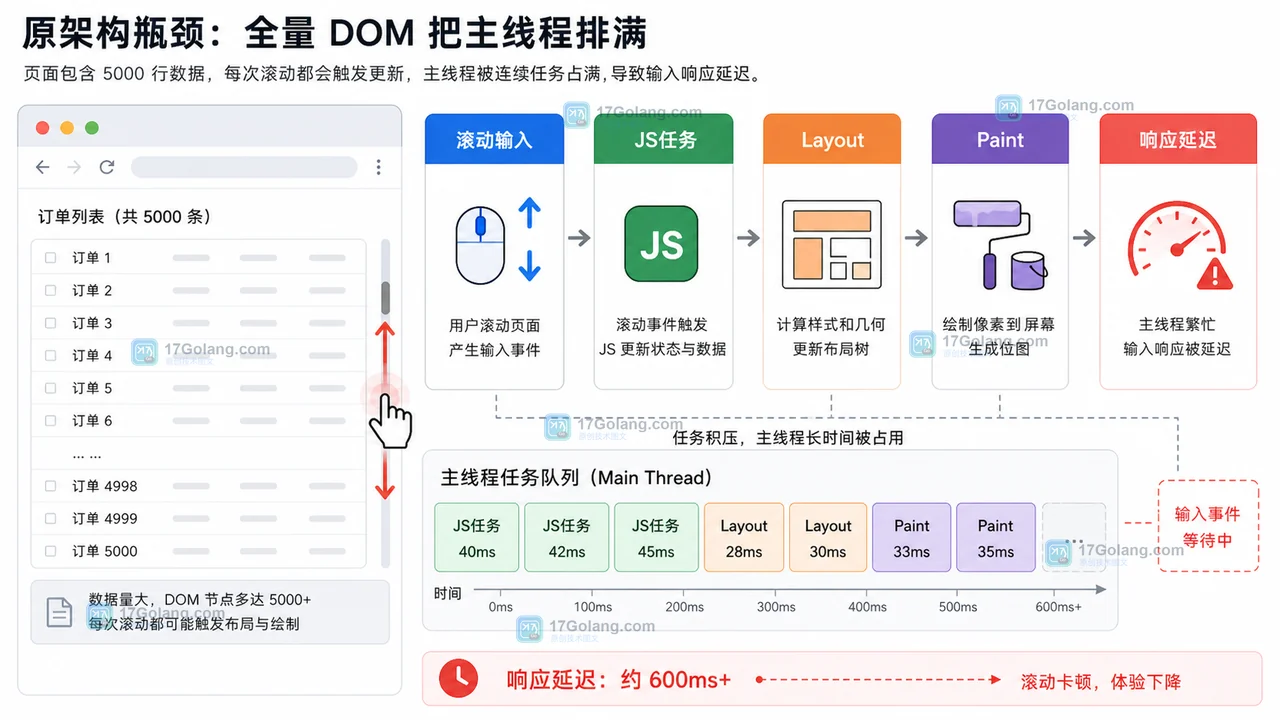
 Golang百万连接处理技巧
Golang百万连接处理技巧
- 上一篇
- Golang百万连接处理技巧

- 下一篇
- 防抖与节流:JS高频触发优化技巧
-

- 文章 · 前端 | 3天前 | 前端 · javascript · AbortController · 表单提交 · AbortController 旧响应覆盖 前端重复提交 loading锁 fetch取消 按钮防抖
- 前端按钮重复提交怎么办:loading 锁和 AbortController 最小配方
- 442浏览 收藏
-
- 文章 · 前端 | 4天前 | 前端 · 缓存 · Service Worker · 白屏 · 发布故障 · 缓存策略 前端白屏 Service Worker CacheStorage 资源404 发布回滚
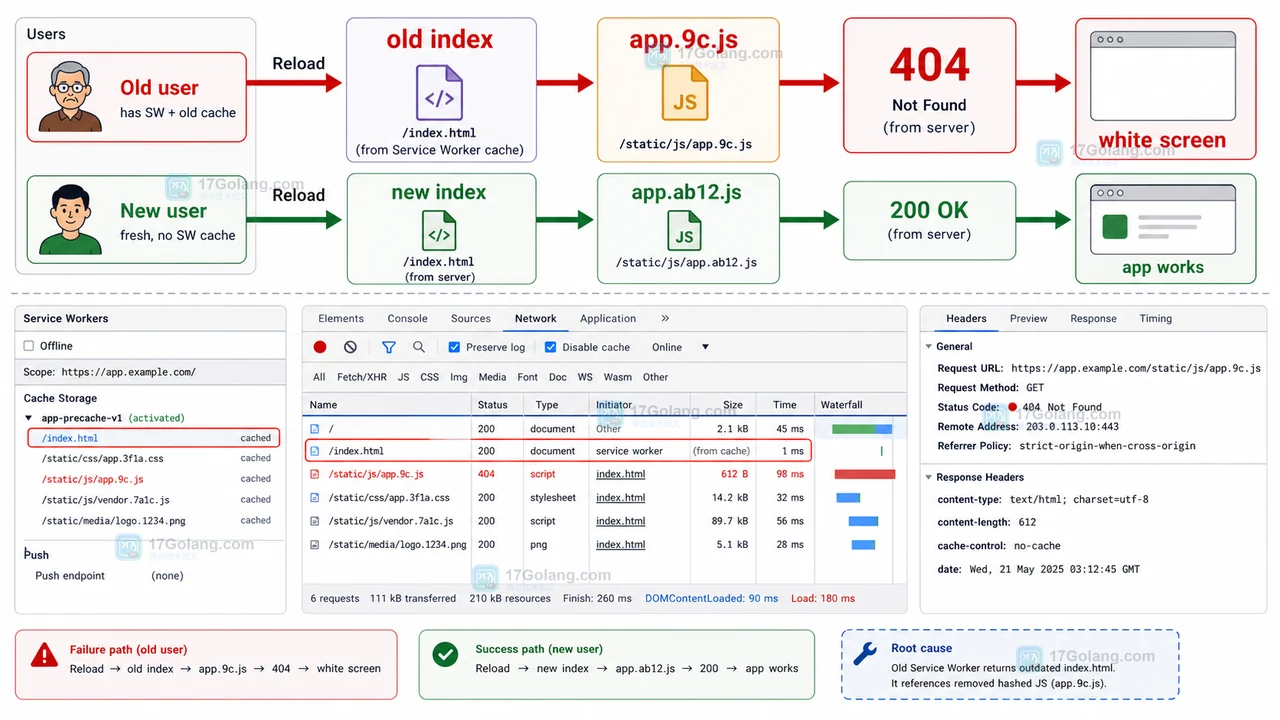
- 前端发布后白屏复盘:Service Worker 缓存旧入口导致 JS 资源 404
- 469浏览 收藏
-
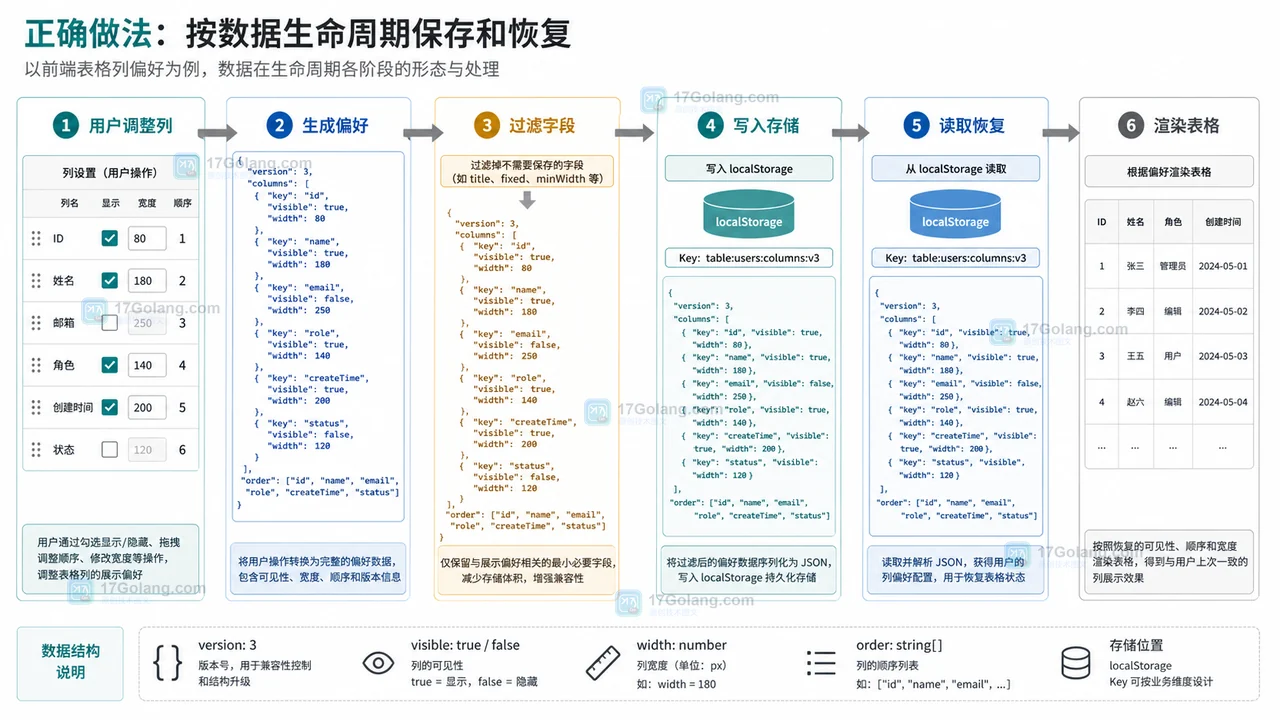
- 文章 · 前端 | 5天前 | 前端开发 · localStorage · 表格配置 · 用户偏好 · 后台系统 · 用户偏好 localStorage 前端表格 列配置 可见列 列宽保存
- 前端表格列设置刷新后丢失怎么办:可见列、列宽和顺序这样保存
- 351浏览 收藏
-

- 文章 · 前端 | 5天前 | 前端 · 接口排查 · 运维手册 · 性能告警 · 前端 AbortController 接口超时 Network瀑布图 降级回滚 线上告警
- 前端接口超时告警运行手册:从瀑布图到降级回滚
- 287浏览 收藏


-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 3770次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 3481次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 3452次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 3644次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 3609次使用
-
- JavaScript函数定义及示例详解
- 2025-05-11 502浏览
-
- CSS变量简化按钮悬停效果技巧
- 2026-05-31 501浏览
-
- JavaScript符号类型详解与应用
- 2026-05-31 501浏览
-
- HTML剪贴板复制粘贴怎么用
- 2026-05-26 501浏览
-
- data-*属性详解:HTML数据存储与DOM操作技巧
- 2026-05-25 501浏览


