ES6Promise如何避免回调地狱
ES6 Promise通过链式调用和统一错误处理机制,有效解决了JavaScript开发中长期存在的“回调地狱”问题。Promise将原本深层嵌套的回调函数扁平化为水平链式调用,显著提升代码可读性和可维护性。通过`.then()`方法返回新的Promise,实现异步操作的串联,而`.catch()`方法则集中处理链中所有错误,避免分散重复的错误判断。此外,Promise还提供`Promise.all()`、`race()`等方法,简化并行异步协调,`finally()`方法则支持无论成功或失败都执行清理操作。Promise的引入,使得异步代码更易读、易维护,也更健壮,是现代JavaScript开发中不可或缺的一部分。
Promise通过链式调用和统一错误处理机制解决了回调地狱问题。1. Promise将多层嵌套的回调扁平化为水平链式调用,提升代码可读性和维护性;2. 通过.then()返回新Promise实现异步操作串联;3. .catch()集中处理链中所有错误,避免分散重复的错误判断;4. 提供Promise.all()、race()等方法简化并行异步协调;5. finally()方法支持无论成功或失败都执行清理操作。

ES6的Promise通过引入一种结构化的方式来处理异步操作,将原本深层嵌套的回调函数扁平化,并提供了一套统一的错误处理机制,从而彻底解决了回调地狱(Callback Hell)这一长期困扰JavaScript开发者的难题。它让异步代码变得更易读、易维护,也更健壮。
解决方案
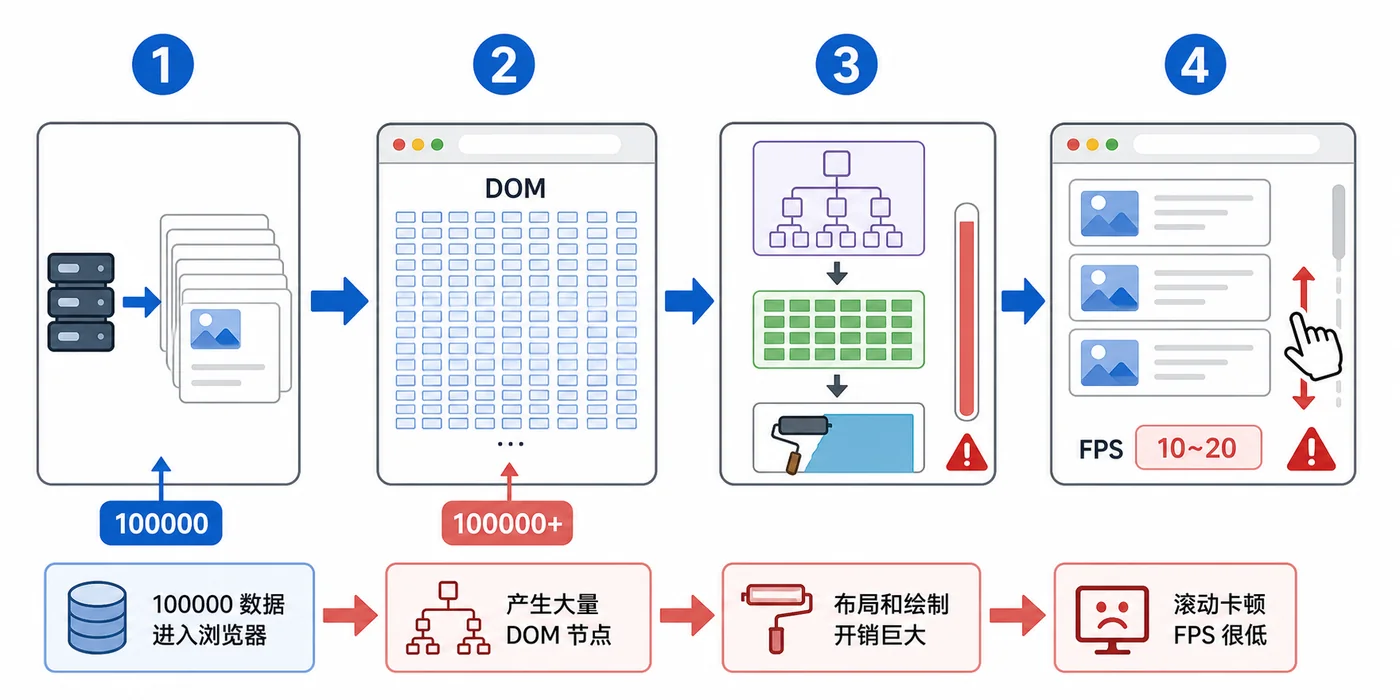
回调地狱,顾名思义,就是当异步操作层层嵌套时,代码结构会变得像金字塔一样向右缩进,难以阅读和维护。想象一下,你需要先从服务器获取用户ID,然后根据ID获取用户信息,接着根据用户信息获取订单列表,最后再展示出来。在传统的基于回调的写法中,这会形成多层嵌套的函数调用,每一步都依赖前一步的结果,且错误处理也变得异常复杂。
Promise的出现,改变了这一切。它是一个代表了异步操作最终完成(或失败)的对象。一个Promise对象有三种状态:pending(进行中)、fulfilled(已成功)和rejected(已失败)。一旦Promise的状态从pending变为fulfilled或rejected,它就不能再改变了。

核心的解决之道在于Promise的链式调用能力。当一个Promise成功完成后,你可以通过.then()方法来注册一个回调函数,这个回调函数会接收到Promise的成功结果。更重要的是,.then()方法本身会返回一个新的Promise对象。这意味着,你可以在第一个.then()之后,再调用第二个.then(),以此类推,将原本垂直嵌套的代码,变成了水平方向的链式调用。
例如,获取用户ID、用户信息、订单列表的例子,使用Promise可以写成:

fetchUserId()
.then(userId => fetchUserInfo(userId))
.then(userInfo => fetchOrderList(userInfo.id))
.then(orderList => displayOrders(orderList))
.catch(error => console.error("操作失败:", error));这种链式结构极大地提升了代码的可读性和可维护性。
什么是回调地狱?它为何如此令人头疼?
我记得刚开始写JavaScript异步代码时,简直是噩梦。那时还没有Promise,所有的异步操作都依赖于回调函数。当你需要执行一系列相互依赖的异步任务时,代码很快就会变得面目全非,这就是我们常说的“回调地狱”(Callback Hell),也有人形象地称之为“厄运金字塔”(Pyramid of Doom)。
简单来说,回调地狱就是指在处理多个异步操作时,为了确保操作顺序,我们将一个回调函数嵌套在另一个回调函数内部,层层递进,导致代码缩进过深,可读性极差。
举个例子,假设我们要模拟几个异步操作:
// 模拟一个异步函数,获取数据1
function getData1(callback) {
setTimeout(() => {
console.log('获取到数据1');
callback(null, 'Data1');
}, 1000);
}
// 模拟一个异步函数,根据数据1获取数据2
function getData2(data1, callback) {
setTimeout(() => {
console.log(`根据 ${data1} 获取到数据2`);
callback(null, 'Data2');
}, 1000);
}
// 模拟一个异步函数,根据数据2获取数据3
function getData3(data2, callback) {
setTimeout(() => {
console.log(`根据 ${data2} 获取到数据3`);
callback(null, 'Data3');
}, 1000);
}
// 回调地狱示例
getData1((err1, res1) => {
if (err1) {
console.error('获取数据1失败', err1);
return;
}
getData2(res1, (err2, res2) => {
if (err2) {
console.error('获取数据2失败', err2);
return;
}
getData3(res2, (err3, res3) => {
if (err3) {
console.error('获取数据3失败', err3);
return;
}
console.log('所有数据获取完毕:', res3);
});
});
});你看,这段代码虽然只有三层嵌套,但缩进已经很深了。如果再多几层,或者中间夹杂着复杂的逻辑和更多的错误处理,那简直是灾难。
它令人头疼的原因主要有几点:
- 可读性差: 代码向右侧无限延伸,阅读起来非常困难,一眼望去都是缩进。
- 维护困难: 任何中间步骤的修改都可能影响到后续所有嵌套的逻辑,牵一发而动全身。
- 错误处理分散: 你会发现每个回调函数里都得写一遍错误判断,错误处理逻辑重复且分散,难以统一管理和追踪错误源头。
- 调试复杂: 异步流程的堆栈信息不连贯,调试时很难准确追踪到问题发生的位置。
这些痛点在实际项目中是真实存在的,极大地降低了开发效率和代码质量。
Promise链式调用的魔力:从嵌套到扁平化
Promise最核心的魅力,就在于它把原本纵向发展的回调嵌套,巧妙地“拉平”成了横向的链式调用。这种设计简直是天才,它把我们从层层缩进的深渊里拉了出来。
要理解它的魔力,首先要明白Promise.prototype.then()方法的神奇之处。当你调用一个Promise实例的.then()方法时,它会返回一个新的Promise实例。这意味着,你可以在这个新的Promise上继续调用.then(),形成一条链。
当你在一个.then()的回调函数中返回一个值(非Promise),这个值会作为下一个.then()的成功结果。而如果你在一个.then()的回调函数中返回了一个新的Promise,那么下一个.then()会等待这个新的Promise解析完成后,才执行其回调。正是后一种机制,实现了异步操作的串联。
让我们用Promise重写上面那个“获取数据”的例子:
// 模拟Promise版本的异步函数
function getData1Promise() {
return new Promise((resolve, reject) => {
setTimeout(() => {
console.log('获取到数据1');
// 模拟成功或失败
Math.random() > 0.1 ? resolve('Data1') : reject('数据1获取失败');
}, 1000);
});
}
function getData2Promise(data1) {
return new Promise((resolve, reject) => {
setTimeout(() => {
console.log(`根据 ${data1} 获取到数据2`);
Math.random() > 0.1 ? resolve('Data2') : reject('数据2获取失败');
}, 1000);
});
}
function getData3Promise(data2) {
return new Promise((resolve, reject) => {
setTimeout(() => {
console.log(`根据 ${data2} 获取到数据3`);
Math.random() > 0.1 ? resolve('Data3') : reject('数据3获取失败');
}, 1000);
});
}
// Promise链式调用示例
getData1Promise()
.then(res1 => {
console.log('第一步完成,结果:', res1);
return getData2Promise(res1); // 返回一个新的Promise
})
.then(res2 => {
console.log('第二步完成,结果:', res2);
return getData3Promise(res2); // 返回一个新的Promise
})
.then(res3 => {
console.log('所有数据获取完毕,最终结果:', res3);
})
.catch(error => { // 统一的错误处理
console.error('链中发生错误:', error);
});看看这段代码,是不是清晰多了?它不再有深层的嵌套,而是通过.then()方法像链条一样串联起来。每个.then()都代表了一个异步步骤的完成,并且其回调函数的返回值决定了链条的下一个环节。这种扁平化的结构,让代码逻辑一目了然,维护起来也方便得多。
这种模式不仅适用于串行异步操作,对于并行操作,Promise也提供了Promise.all()和Promise.race()等方法,让复杂的异步协调变得异常简洁。
错误处理的优雅之道:Promise的catch方法
在回调地狱中,错误处理是个老大难的问题。因为异步操作的特性,try...catch语句无法直接捕获跨越异步边界的错误。所以,你不得不将错误作为回调函数的第一个参数(Node.js风格)或者单独处理,这导致错误处理逻辑散落在代码的各个角落,写起来重复,读起来心累,调试起来更是头大。以前,我得在每个回调里都写一遍错误判断,现在,一个catch就搞定了,简直是福音。
Promise的catch()方法(其实是.then(null, rejectionHandler)的语法糖)彻底改变了这种局面。它提供了一种集中、统一的错误处理机制。
当Promise链中的任何一个Promise被rejected(即异步操作失败)时,这个错误会沿着Promise链向下传递,直到遇到最近的一个catch()方法被捕获。这意味着,你不需要在每个.then()中都去判断错误,只需要在链的末尾或者某个关键节点放置一个catch(),就能捕获到之前所有步骤中可能发生的错误。
// 假设 getData2Promise 模拟了一个错误
function getData2PromiseWithError(data1) {
return new Promise((resolve, reject) => {
setTimeout(() => {
console.log(`尝试根据 ${data1} 获取数据2 (模拟错误)`);
// 模拟一个错误
reject(new Error('模拟:数据2获取失败,网络中断!'));
}, 1000);
});
}
getData1Promise()
.then(res1 => {
console.log('第一步完成,结果:', res1);
return getData2PromiseWithError(res1); // 这里可能会失败
})
.then(res2 => { // 如果getData2PromiseWithError失败,这一步将不会执行
console.log('第二步完成,结果:', res2);
return getData3Promise(res2);
})
.then(res3 => {
console.log('所有数据获取完毕,最终结果:', res3);
})
.catch(error => { // 任何一个Promise失败,都会被这个catch捕获
console.error('发生致命错误,处理流程中断:', error.message);
// 在这里可以进行统一的错误日志记录、用户提示等操作
});在这个例子中,即使getData2PromiseWithError抛出了错误,后面的then也不会被执行,错误会直接跳到catch块。这种机制让错误处理变得异常简洁和高效。你可以在一个地方集中处理所有潜在的错误,而不是在每个异步步骤中重复编写错误处理逻辑。这不仅减少了代码量,也使得错误调试和排查变得更加容易。
此外,Promise还提供了finally()方法,无论Promise最终是成功还是失败,它都会被执行。这对于执行一些清理工作(例如关闭加载动画、释放资源)非常有用,而不需要在then和catch中都重复编写。
总的来说,Promise通过其链式调用和统一的错误处理机制,将异步编程从“回调地狱”的泥潭中解救出来,让JavaScript在处理复杂异步逻辑时变得更加优雅和强大。
终于介绍完啦!小伙伴们,这篇关于《ES6Promise如何避免回调地狱》的介绍应该让你收获多多了吧!欢迎大家收藏或分享给更多需要学习的朋友吧~golang学习网公众号也会发布文章相关知识,快来关注吧!
 TCL智能锁5年领航,11项大奖实力认证
TCL智能锁5年领航,11项大奖实力认证
- 上一篇
- TCL智能锁5年领航,11项大奖实力认证

- 下一篇
- PHP数据备份与恢复方法全解析
-

- 文章 · 前端 | 1天前 | 前端 · javascript · sourcemap · 错误监控 · 线上排查 · 前端 错误监控 告警 onerror sourcemap unhandledrejection
- 前端错误监控实战:onerror、unhandledrejection 和 sourcemap 定位问题
- 331浏览 收藏
-

- 文章 · 前端 | 1天前 | 前端 · javascript · 缓存治理 · localStorage · Web性能 · 前端 本地缓存 localStorage 过期时间 版本迁移 异常兜底
- 前端 localStorage 缓存治理实战:过期时间、版本号和异常兜底
- 480浏览 收藏
-

- 文章 · 前端 | 1天前 | 前端 · 性能优化 · javascript · 图片优化 · IntersectionObserver · 前端 性能优化 图片懒加载 IntersectionObserver Web性能 首屏优化
- 前端图片懒加载实战:用 IntersectionObserver 降低首屏压力
- 184浏览 收藏
-
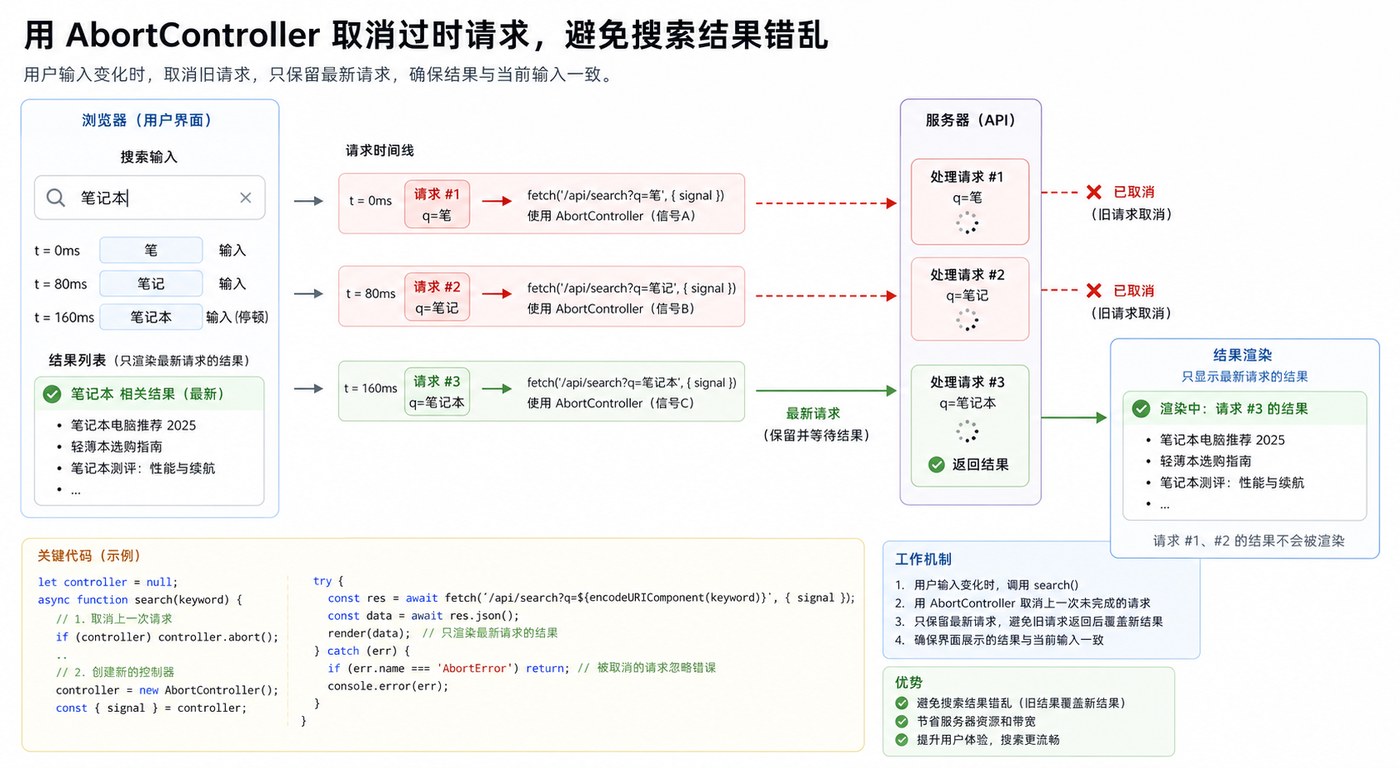
- 文章 · 前端 | 2天前 | 前端 · 性能优化 · javascript · fetch · 前端 搜索优化 Fetch AbortController 请求竞态
- 前端搜索竞态治理实战:用 AbortController 取消过期请求
- 178浏览 收藏
-
- 文章 · 前端 | 2天前 |
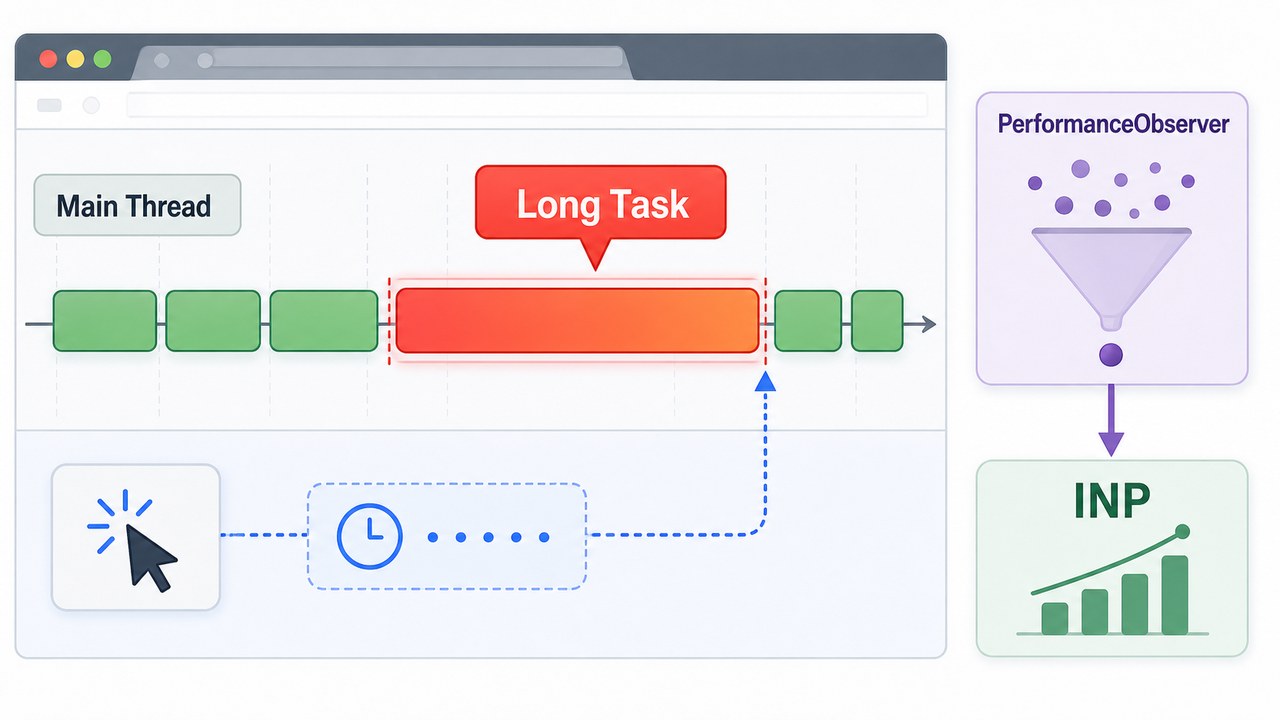
- 前端长任务治理实战:用 PerformanceObserver 找出页面卡顿源头
- 423浏览 收藏
-

- 文章 · 前端 | 1星期前 |
- CSS数字显示统一技巧,OpenType特性应用方法
- 209浏览 收藏
-

- 文章 · 前端 | 1星期前 |
- PerformanceAPI全生命周期预警指南
- 147浏览 收藏
-

- 文章 · 前端 | 1星期前 |
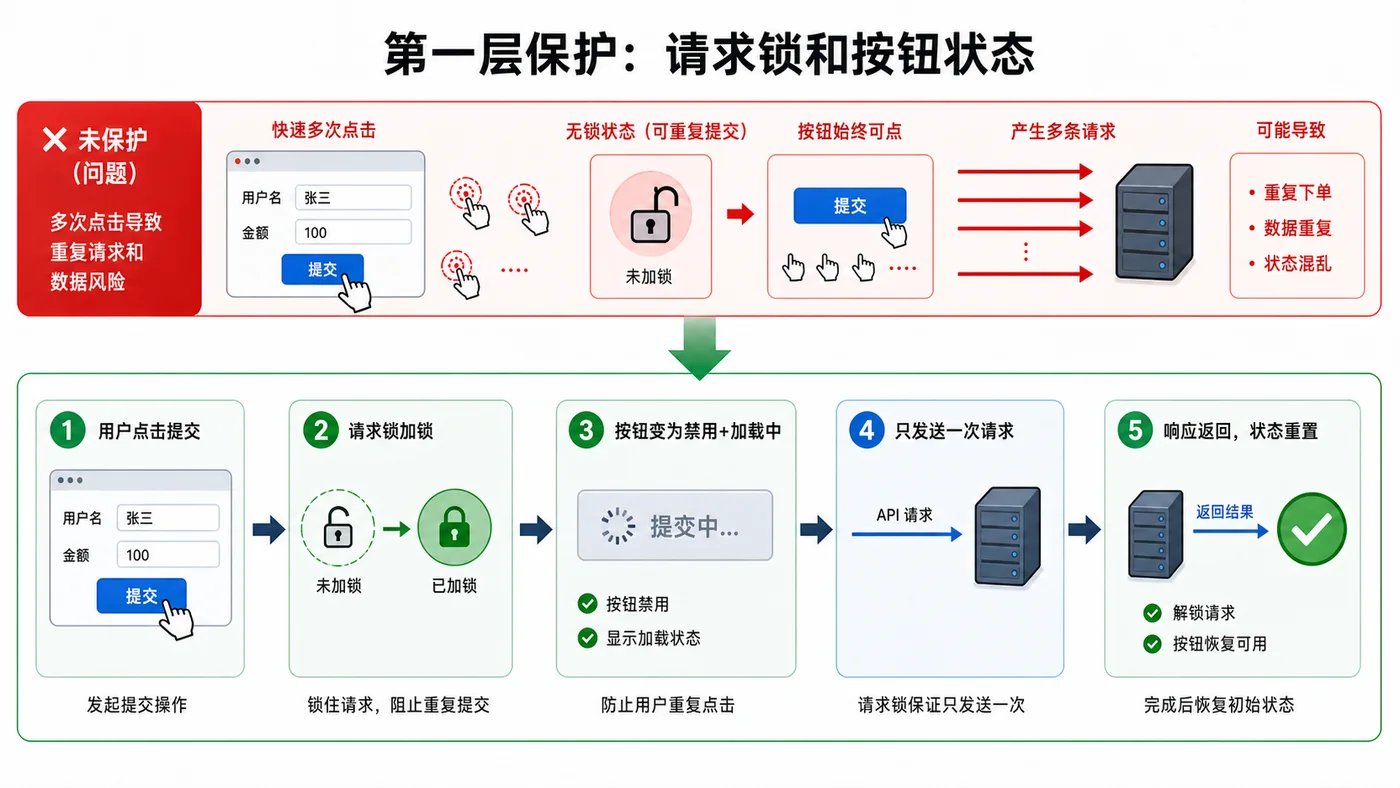
- 一个按钮控制多个状态的实现方式
- 360浏览 收藏
-

- 文章 · 前端 | 1星期前 |
- CSSGrid子元素排序技巧分享
- 155浏览 收藏
-
- 文章 · 前端 | 1星期前 |
- FIMO支持透明度设置吗?
- 393浏览 收藏
-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ChatExcel酷表
- ChatExcel酷表是由北京大学团队打造的Excel聊天机器人,用自然语言操控表格,简化数据处理,告别繁琐操作,提升工作效率!适用于学生、上班族及政府人员。
- 8594次使用
-
- Any绘本
- 探索Any绘本(anypicturebook.com/zh),一款开源免费的AI绘本创作工具,基于Google Gemini与Flux AI模型,让您轻松创作个性化绘本。适用于家庭、教育、创作等多种场景,零门槛,高自由度,技术透明,本地可控。
- 9010次使用
-

- 可赞AI
- 可赞AI,AI驱动的办公可视化智能工具,助您轻松实现文本与可视化元素高效转化。无论是智能文档生成、多格式文本解析,还是一键生成专业图表、脑图、知识卡片,可赞AI都能让信息处理更清晰高效。覆盖数据汇报、会议纪要、内容营销等全场景,大幅提升办公效率,降低专业门槛,是您提升工作效率的得力助手。
- 8842次使用
-
- 星月写作
- 星月写作是国内首款聚焦中文网络小说创作的AI辅助工具,解决网文作者从构思到变现的全流程痛点。AI扫榜、专属模板、全链路适配,助力新人快速上手,资深作者效率倍增。
- 10740次使用
-
- MagicLight
- MagicLight.ai是全球首款叙事驱动型AI动画视频创作平台,专注于解决从故事想法到完整动画的全流程痛点。它通过自研AI模型,保障角色、风格、场景高度一致性,让零动画经验者也能高效产出专业级叙事内容。广泛适用于独立创作者、动画工作室、教育机构及企业营销,助您轻松实现创意落地与商业化。
- 9681次使用
-
- JavaScript函数定义及示例详解
- 2025-05-11 502浏览
-
- 优化用户界面体验的秘密武器:CSS开发项目经验大揭秘
- 2023-11-03 501浏览
-
- 使用微信小程序实现图片轮播特效
- 2023-11-21 501浏览
-
- 解析sessionStorage的存储能力与限制
- 2024-01-11 501浏览
-
- 探索冒泡活动对于团队合作的推动力
- 2024-01-13 501浏览


