NeurIPS 2024 | 机器人操纵世界模型来了,成功率超过谷歌RT-1 26.6%
编程并不是一个机械性的工作,而是需要有思考,有创新的工作,语法是固定的,但解决问题的思路则是依靠人的思维,这就需要我们坚持学习和更新自己的知识。今天golang学习网就整理分享《NeurIPS 2024 | 机器人操纵世界模型来了,成功率超过谷歌RT-1 26.6%》,文章讲解的知识点主要包括,如果你对科技周边方面的知识点感兴趣,就不要错过golang学习网,在这可以对大家的知识积累有所帮助,助力开发能力的提升。

AIxiv专栏是本站发布学术、技术内容的栏目。过去数年,本站AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
对于人类而言,一旦掌握了 “打开瓶盖” 的动作,面对 “拧紧螺丝” 这样的任务通常也能游刃有余,因为这两者依赖于相似的手部动作。然而,对于机器人来说,即使是这样看似简单的任务转换依然充满挑战。例如,换成另一种类型的瓶盖,机器人可能无法成功打开。这表明,目前的机器人方法尚未充分让模型学习到任务的内在执行逻辑,而只是单纯的依赖于数据拟合。
针对该问题,来自中山大学和华为诺亚等单位的研究团队提出了一种全新的原语驱动的路径点感知世界模型,借助 VLMs 作为机器人的大脑,理解任务之间的动作关联性,并通过 “世界模型” 获取对未来动作的表征,从而更好地帮助机器人学习和决策。该方法显著提升了机器人的学习能力,并保持良好的泛化性。
论文地址:https://arxiv.org/abs/2410.10394 项目主页:https://abliao.github.io/PIVOT-R/
研究动机
当前,现有机器人操作任务有两个关键问题:
机器人模型在开放世界中表现差且不稳定:许多机器人操作模型虽然能够处理复杂任务,但往往直接将用户指令和视觉感知映射到低层次的可执行动作上,而忽略了操作任务中关键状态(路径点)的建模。这种方式容易使模型记住表面数据模式,导致模型在开放环境中表现脆弱。模型缺乏对关键路径点的预测,使得每个动作的随机性可能逐步放大,降低了任务的执行成功率。 计算效率低:随着模型的增大(例如 RT-2, RT-H),运行速率随之降低,无法满足机器人任务实时性的需求。
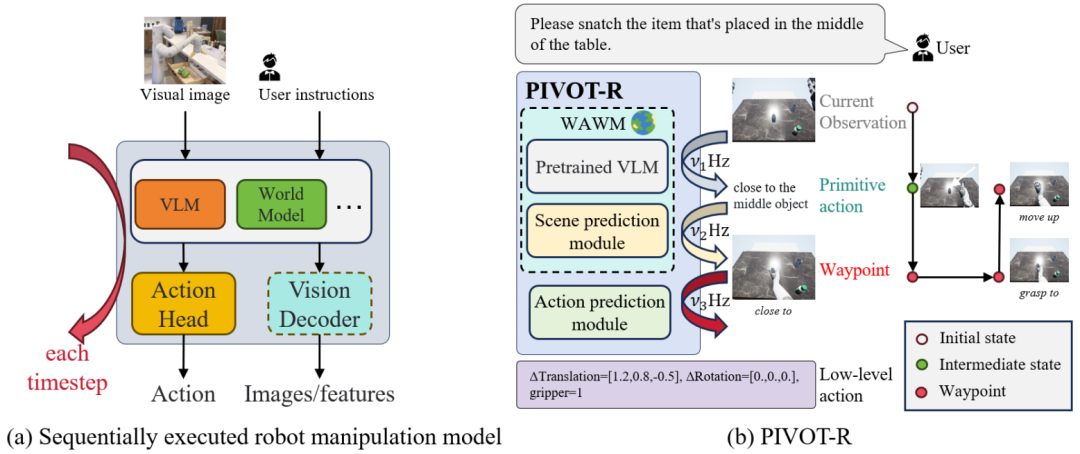
为了解决上述问题,研究团队提出了 PIVOT-R,一种原语驱动的路径点感知世界模型。如上图所示,对比左图现有的方法,右图展示了 PIVOT-R 通过关注与任务相关的路径点预测,提升机器人操作的准确性,并设计了一个异步分层执行器,降低计算冗余,提升模型的执行效率。
这样做有几个好处:
它使得模型可以更好的学习任务与动作之间的内在关联性,减少其他干扰因素的影响,并更好地捕捉不同任务之间的相似性(例如,拧瓶盖和拧螺丝的动作是相似的,拿杯子和搭积木都有一个抓住物体的过程),从而使得模型可以在多任务数据下学习到可迁移的知识。 通过世界模型建模的方式获得对未来关键动作的表征,避免了文本语言带来的模糊性、不确定性。 通过异步执行的方式,确保各模块独立运行、互不阻塞,从而有效避免了大模型导致的低速率问题。
研究方法
原语动作解析
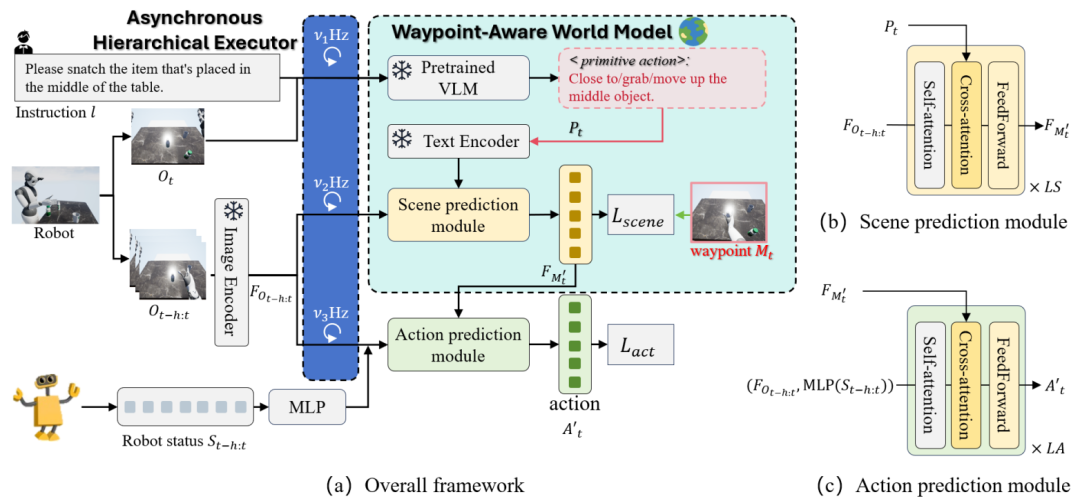
PIVOT-R 的第一个核心步骤是原语动作解析,这一步通过预训练的视觉 - 语言模型(VLM)来解析用户的语言指令。VLM 可以将复杂的自然语言指令转换为一组简单的原语动作,例如 “靠近”、“抓取”、“移动” 等。这些原语动作为机器人提供了操作任务的粗略路径。
具体流程如下:
用户输入的语言指令(例如 “请给我那个杯子”)首先被输入到 VLM 中,VLM 会将其解析为与任务相关的原语动作(如 “靠近杯子”、“抓取杯子”)。 原语动作作为提示,指导机器人在接下来的步骤中专注于特定的操作轨迹点。这种方式确保机器人不会被复杂的环境因素干扰,而是明确知道每个动作的目的。
路径点预测
在原语动作解析后,PIVOT-R 的下一步是路径点预测。路径点代表了机器人操控过程中一些关键的中间状态,例如靠近物体、抓取物体、移动物体等。通过预测路径点,PIVOT-R 能够在机器人执行任务时提供明确的操作指导。具体来说,通过一个 Transformer 架构的模型,预测路径点对应的视觉特征,为后续的动作预测模块提供指引。
动作预测模块
动作预测模块负责根据预测的路径点生成具体的低层次机器人动作。它以路径点为提示,结合机器人历史状态(如位置、姿态等),计算下一步应该执行的动作。该模块使用轻量级的 Transformer 架构进行动作预测,确保计算效率和性能的平衡。这一模块的设计重点在于低延迟和高精度执行操控任务。
异步分层执行器
此外,PIVOT-R 还引入了一个关键的执行机制,即异步分层执行器。与以往的机器人模型不同,PIVOT-R 并不对所有模块在每一步都进行同步更新,而是为不同模块设置了不同的执行频率,以多线程的方式进行异步更新,从而提升执行速度。
实验
作者在具有复杂指令的 SeaWave 仿真环境和真实环境下进行实验。
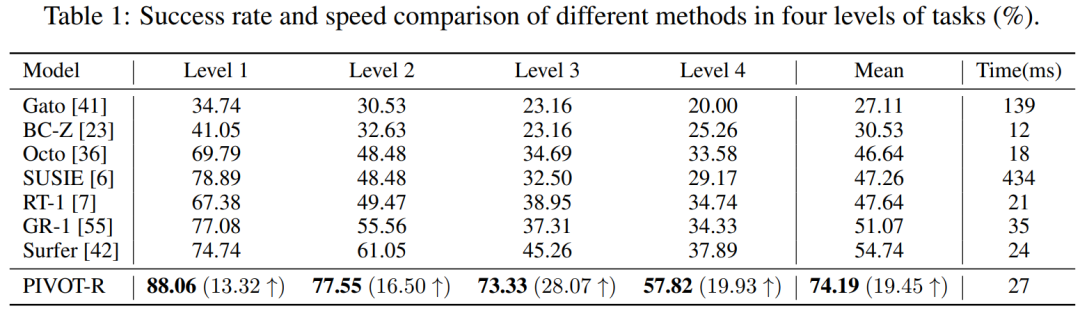
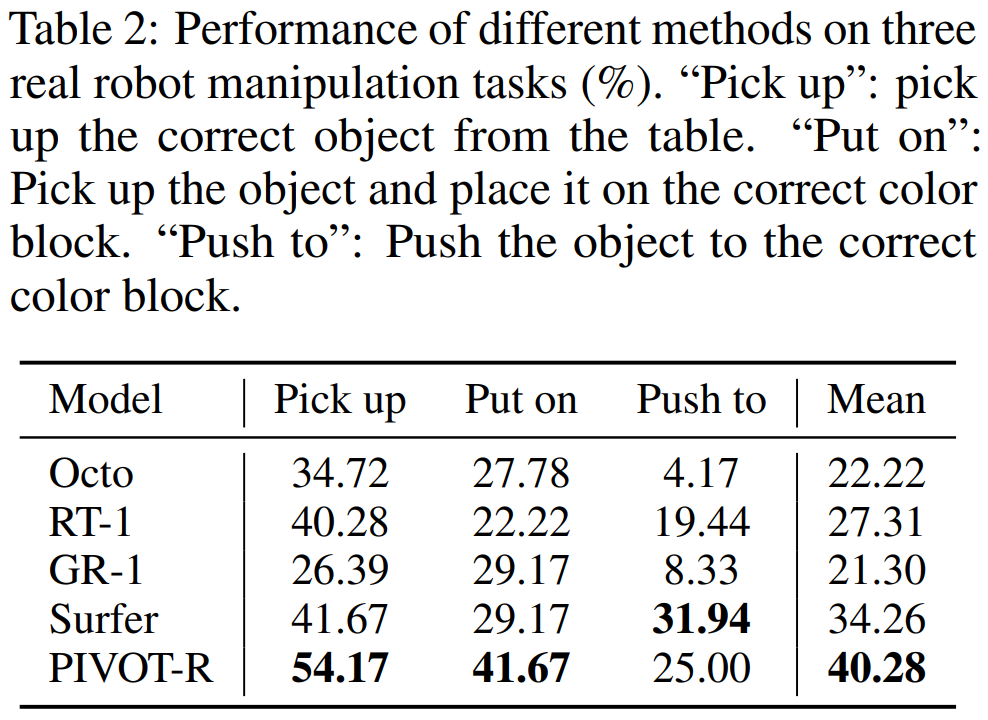
如 Table 1 和 Table 2 所示,PIVOT-R 在仿真环境和真实环境都取得了最优的效果,同时,模型的速度和 RT-1 等方法速度相近,没有因为使用大模型而导致速度变慢。
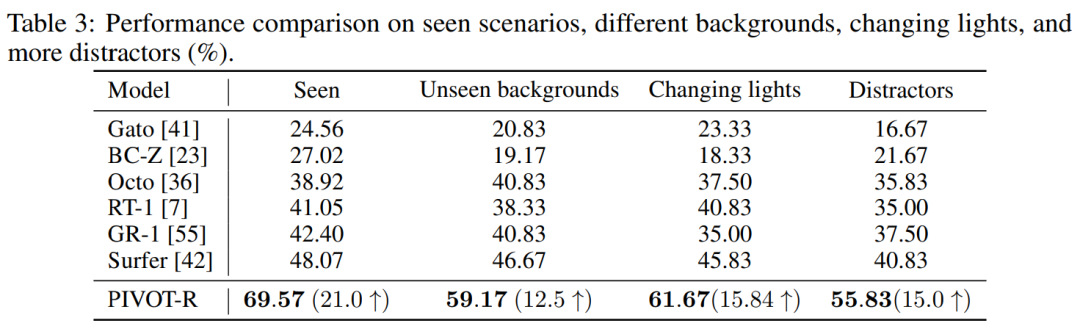
作者也在 SeaWave 上做了泛化性测试,在三种泛化性测试场景下,PIVOT-R 仍保持远高于其他模型的成功率。
研究总结
PIVOT-R 通过引入原语动作驱动的路径点感知,显著提升了机器人在复杂操控任务中的性能。该模型不仅在执行效率上具备优势,还能够更好地应对复杂、多变的环境。该方法在仿真环境和真实环境操纵下表现优异,为机器人学习提供了一个新范式。
今天关于《NeurIPS 2024 | 机器人操纵世界模型来了,成功率超过谷歌RT-1 26.6%》的内容就介绍到这里了,是不是学起来一目了然!想要了解更多关于机器人,工程,PIVOT-R的内容请关注golang学习网公众号!
 Element-UI 中 label 标签文字跑到上方,如何解决?
Element-UI 中 label 标签文字跑到上方,如何解决?
- 上一篇
- Element-UI 中 label 标签文字跑到上方,如何解决?
- 下一篇
- SpringBoot 项目双数据源连接失败:如何解决“Communications link failure”?





-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 1380次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 1328次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 1272次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 1449次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 1446次使用
-
- GPT-4王者加冕!读图做题性能炸天,凭自己就能考上斯坦福
- 2023-04-25 501浏览
-
- 单块V100训练模型提速72倍!尤洋团队新成果获AAAI 2023杰出论文奖
- 2023-04-24 501浏览
-
- ChatGPT 真的会接管世界吗?
- 2023-04-13 501浏览
-
- VR的终极形态是「假眼」?Neuralink前联合创始人掏出新产品:科学之眼!
- 2023-04-30 501浏览
-
- 实现实时制造可视性优势有哪些?
- 2023-04-15 501浏览


